





















Getting Started with AKD EtherCAT Drives and NI SoftMotion
|
© National Instruments
|
23
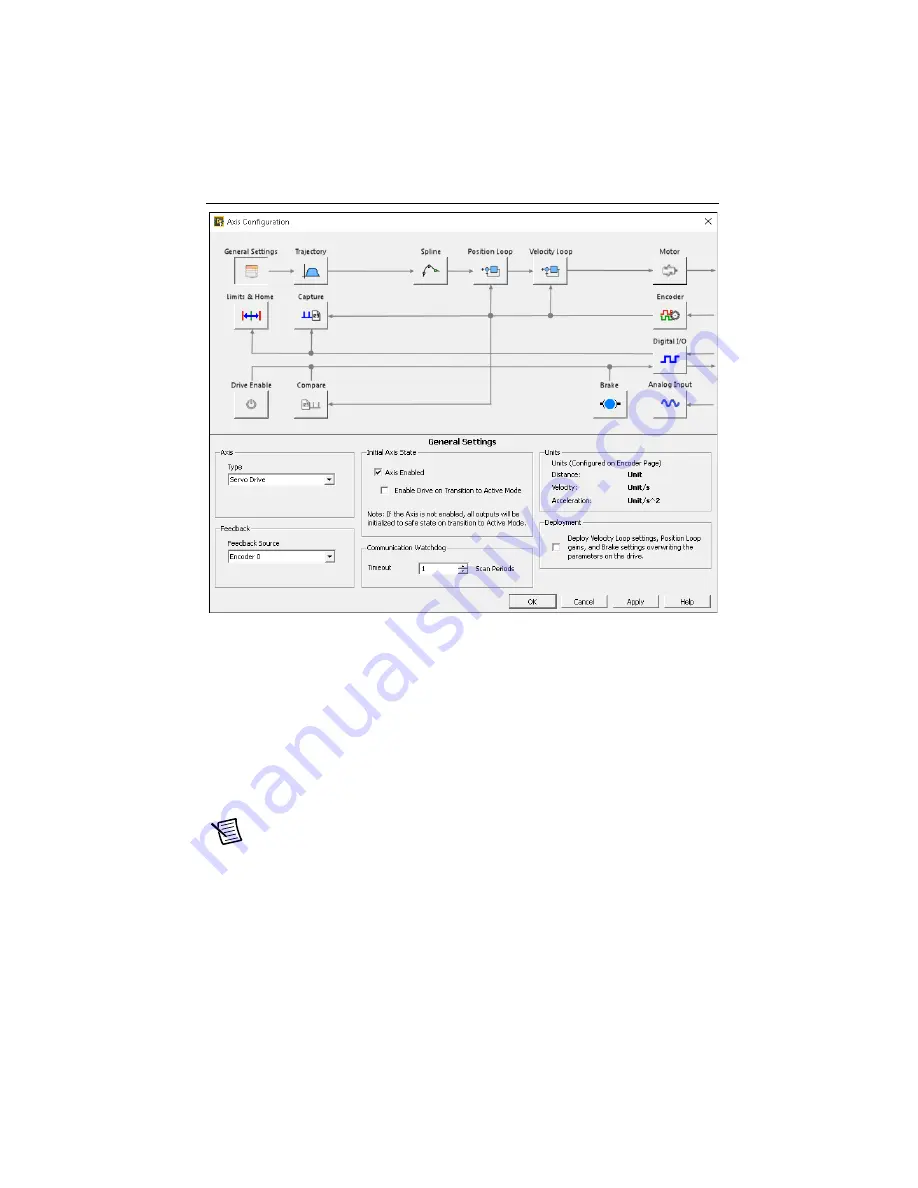
Figure 19.
Axis Configuration Dialog Box for AKD EtherCAT Servo Drives
2.
On the
General Settings
page, confirm that the
Axis Enabled
checkbox contains a
checkmark and that the
Enable Drive on Transition to Active Mode
checkbox does not
contain a checkmark.
3.
On the
General Settings
page, in the
Deployment
section, there is an option to deploy
configured settings to the drive. This is unselected by default, as the default drive settings
work well for most applications. When selected, the drive settings will be overwritten by
the Velocity Loop settings, Position Loop gains, and Brake settings configured with the
Axis Configuration
dialog box. National Instruments recommends leaving this option
unselected and using WorkBench to configure the drive. Refer to
WorkBench and Configure the Drive
for more information.
Note
The Position Error Limit, set on the Position Loop page, will always be
deployed to the drive regardless of your deployment selection.