




























2.5 Operating Range, Angle and Speed Monitoring Function
2-27
2.5.3 Angle monitoring
This function monitors the operating ranges of the robot axes, and when any of the axes has exceeded the
operating range, it shuts off the safety outputs to stop the robot safely.
The “soft limit function” is used to restrict the robot axes so that they will not exceed the operating ranges, but
it is still possible for these axes to move beyond the restricted range because of an operating error, trouble in the
controller or motor or other type of trouble. To prevent this, when movement is judged to have exceeded the
same operating range as the “soft limit function” setting inside the RMU, the safety outputs are shut off and stop
the robot.
For the detail of setting operation, refer to the instruction manual “SETUP”, “Chapter 4: Set up”.
2.5.4 How to reset operating range and angle monitoring function
DANGER
The resetting procedure described in this section makes it possible to cancel the
operating range monitoring and angle monitoring functions and move the robot.
For this reason, great care must be exercised in using the procedure.
Sudden or unexpected movements of the robot resulting in its coming into contact with or
pinning an operator can cause death or serious injury or disasters.
The resetting procedure to be followed when trouble has occurred in the operating range monitoring or angle
monitoring which causes the robot to stop is described here. If, for some reason, the robot has moved beyond
an operating range which has been set before it stops, it may be necessary to operate the robot and move it
back inside the operating range.
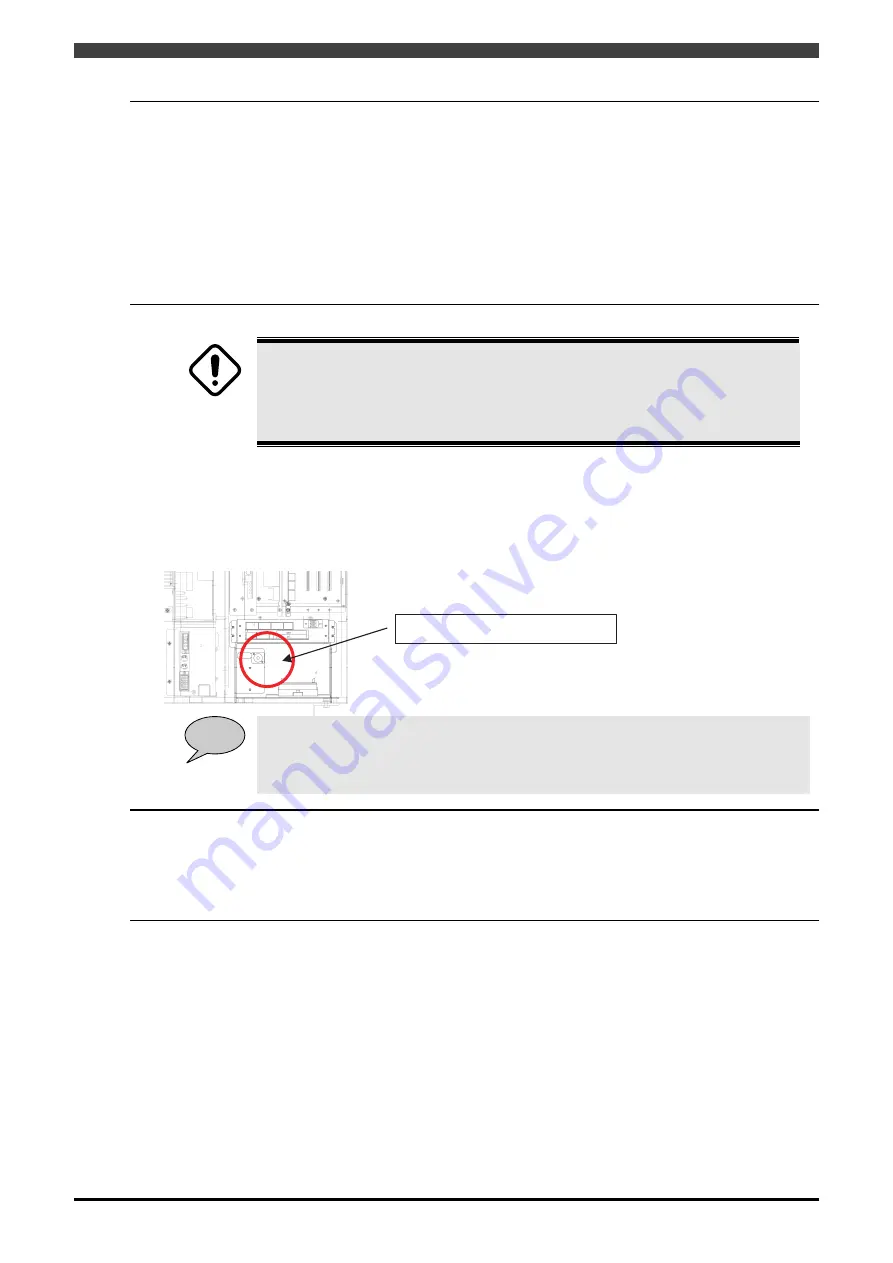
In TEACH mode, it is possible to turn motor power ON while pressing "LS release SW" (inputting "LS release
SW" signal).
POINT
"LS release SW" signal cancels only the operating range and angle monitoring functions of
the RMU. It may not be possible to turn motor power on due to the “virtual safety fence
function” or “soft limit function” in FD controller.
Since these functions can be canceled on constants setting screen, perform the operations
in the "Constant Setting" screen in TEACH mode.
2.5.5 Speed monitoring
In TEACH mode, the speed monitoring function calculates the TCP speed. If this speed exceeds 250 mm/sec.
(safety speed), RMU shuts off the safety output to stop the robot safely.
In addition, In PLAYBACK mode, If the TCP speed or JOINT speed is exceeds the determined speed, RMU
shuts off the safety output to stop the robot safely.
2.5.6 Stop monitoring
When a stop monitoring signal that is assigned to one of the general safety input signal 1-5 is OFF, the stop
status of the TCP and each joint angle can be monitored.
During the signal is OFF, RMU monitors the status of the robot stop. If the robot moves, RMU shuts off the
safety output to stop the robot safely.
(When turning ON the controller, turn the signal ON.)
Previously, set the “stop monitoring” range for TCP and each axis. When the robot has been running over
those defined range, RMU shuts off the safety output to stop the robot safely.
LS release SW
:
LSSW
Содержание RMU20-20
Страница 2: ......
Страница 6: ...Contents 4 ...
Страница 8: ......
Страница 26: ...1 4 EC DECLARATION OF CONFORMITY FOR MACHINERY 1 18 NOTE ...
Страница 68: ...2 9 Enabling RMU 2 40 NOTE ...
Страница 70: ......
Страница 86: ...3 2Operation procedure 3 16 Top Display Form Limit Side Display Sphere Limit Side Display Form Limit ...
Страница 100: ...3 4 Setting when a slider unit is used 3 30 NOTE ...
Страница 102: ......
Страница 138: ...4 4Approval 4 36 8 Approval is completed The following screen will be displayed ...
Страница 144: ......
Страница 154: ...5 4Trouble shooting 5 10 NOTE ...
Страница 156: ......
Страница 166: ...6 4Trouble shooting 6 10 NOTE ...
Страница 168: ......
Страница 189: ......







































































