





























Page 95
Suppress zero pulse
: If the check box is selected, no index pulse will be issued.
Reversal of rotation direction
: If the check box is selected the direction of rotation of the
incremental encoder emulation will be inverted.
Offset angle
: Here you can set an offset between the index position of the encoder of the
DUET_FL servo positioning controller and the emulated index pulse.
The outputs DOUT1 and DOUT2 supply signals with a 24 V level, so-called HTL signals.
Older or low-cost control systems in particular can directly process these signals.
In order to be able to transmit high speeds with a high resolution, DOUT1 and DOUT2
should be equipped with a resistor of 1 k
Ω
against 0 V.
Please contact your local distributor if your control system cannot process HTL signals
but RS422-compatible track signals. In many cases, the DUET_FL controller can also be
connected to these inputs provided they are equipped with additional resistors.
5.6
Holding brake DOUT3
If your motor has a holding brake, this brake can be controlled by the DUET_FL servo positioning
controller as required by the operation. The DUET_FL servo positioning controller can only control
holding brake having a rated voltage of 24 V DC.
It has to be connected via the digital output DOUT3 at connector X3. A detailed description concerning
the connection of the holding brake and the maximum permissible operating currents of the brake can
be found in
chapter 14.2 Connection: Holding brake [X3]
Brake functions
The holding brake is enabled when the controller is enabled and the power stage of the servo
positioning controller is activated. Holding brakes have switching delays due to their mechanical inertia
and the electrical time constant of the control coil. This is taken into consideration by the servo
positioning controller. You can parameterize corresponding delays.
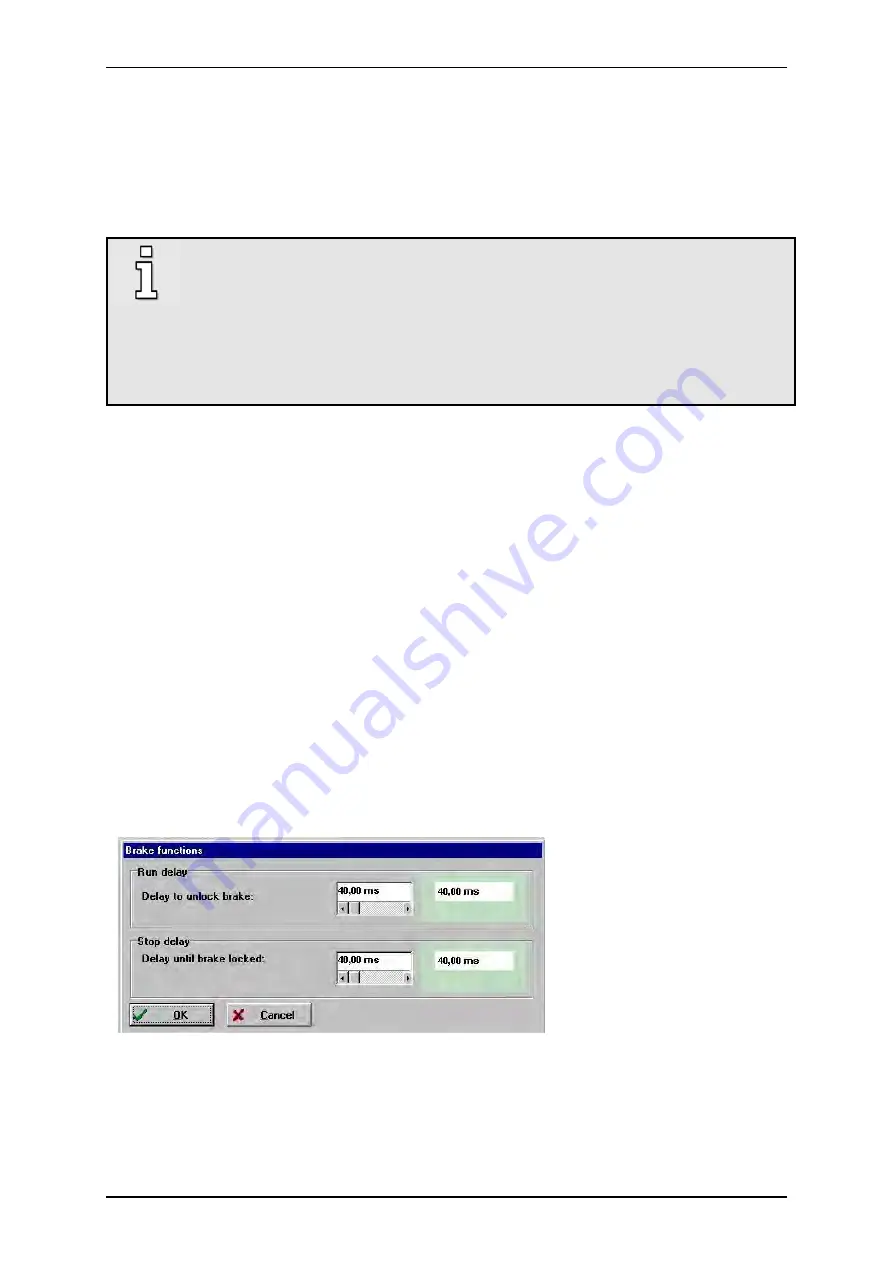
.If you want to edit the parameters for controlling the holding brake, open the menu under
Parameters/Device parameters/Brake functions
. The following window will appear:
The
run delay
is used to adapt the
control of the holding brake to its mechanical inertia. When the controller is enabled in the operating
mode "speed control" and "position control" or "positioning", the speed setpoint will be set to zero
during this delay. As a result, the motor will be supplied with power, but the drive remains in standstill
with a holding torque until the brake is completely unlocked.
User Manual DUET_FL „DUET_FL 48/10“
Version 1.1 Motor Power Company
Содержание DUET_FL 48/10
Страница 3: ...ber dieses Handbuch Page 3...
Страница 4: ...Page 4 User Manual DUET_FL DUET_FL 48 10 Version 1 1 Motor Power Company...
Страница 12: ...Page 12 List of Figures User Manual DUET_FL DUET_FL 48 10 Version 1 1 Motor Power Company...
Страница 15: ...Page 15 List of Tables User Manual DUET_FL DUET_FL 48 10 Version 1 1 Motor Power Company...
Страница 76: ...Page 76 User Manual DUET_FL DUET_FL 48 10 Version 1 1 Motor Power Company...
Страница 196: ...Page 196 User Manual DUET_FL DUET_FL 48 10 Version 1 1 Motor Power Company...







































































