





























7.3 Torque controller
The torque controller is executed as a PI controller. The gain (P-component) and the
integral-action time (I-component) of the individual controllers are programmable. In
order to optimize the current control loop, two rectangular reference steps are preset.
The object of the optimization is a current controller with moderate dynamism and
the following values:
Current control time: < 1 ms
Overshoot: < 5 %
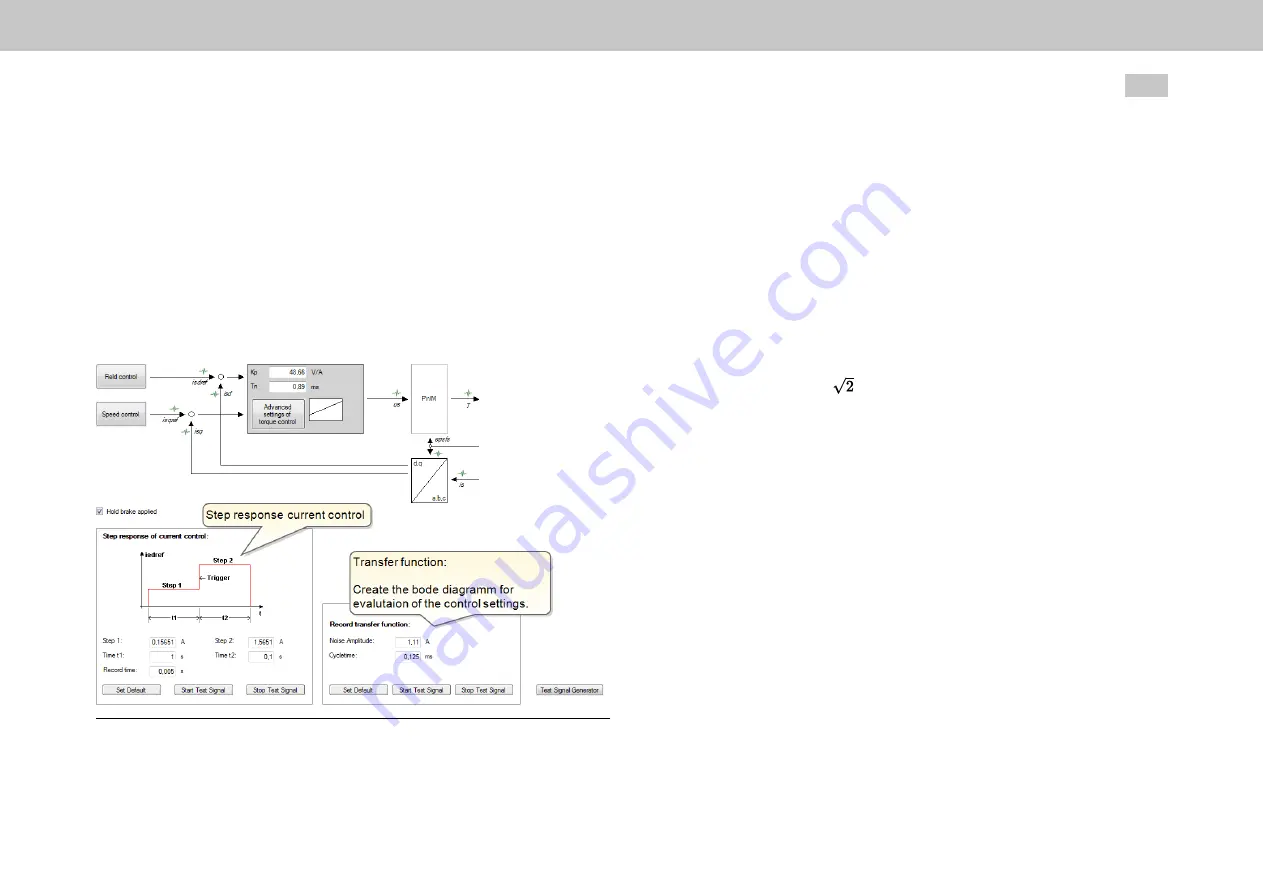
Fig. 7.5: “Current/torque controller settings” dialog box
MOOG
ID
No.:
CB40859-001
Date:
02/2018
MSD Servo Drive - Device Help
110
7 Control
7.3.1 Current controller optimization
The faster the actual value approaches the setpoint, the more dynamically the
controller is set. The overshoot of the actual value should not be more than
5-10 % of the setpoint (general figure) during the settling process.
The first step (stage 1, time 1) moves the rotor to a defined position.
The second step (stage 2, time 2) is used to optimize the torque control (step
response). The magnitude of the 2nd step should not be too large, so as to
ensure that the voltage setpoint will not go all the way to the limit (low-level
signal response required).
The current and time settings automatically adjust to the motor data. The
current is equal to I
n
•
.
ISDSH and ENPO (hardware enable) must be set to "High".
Click "Start test signal" button
Observe the safety notice: When you confirm the safety notice a step
response is executed.
The oscilloscope will be configured automatically.
Содержание MSD Servo Drive Series
Страница 3: ...MOOG ID No CB40859 001 Date 02 2018 MSD Servo Drive Device Help 3 Change history...
Страница 4: ...MOOG ID No CB40859 001 Date 02 2018 MSD Servo Drive Device Help 4 Change history...
Страница 14: ...MOOG ID No CB40859 001 Date 02 2018 MSD Servo Drive Device Help 14 1 General information...