





























3. Functionality
647C
3.5 Tuning the PID Controller
There are three additional parameters to setup the PID algorithm, with the PID optional only.
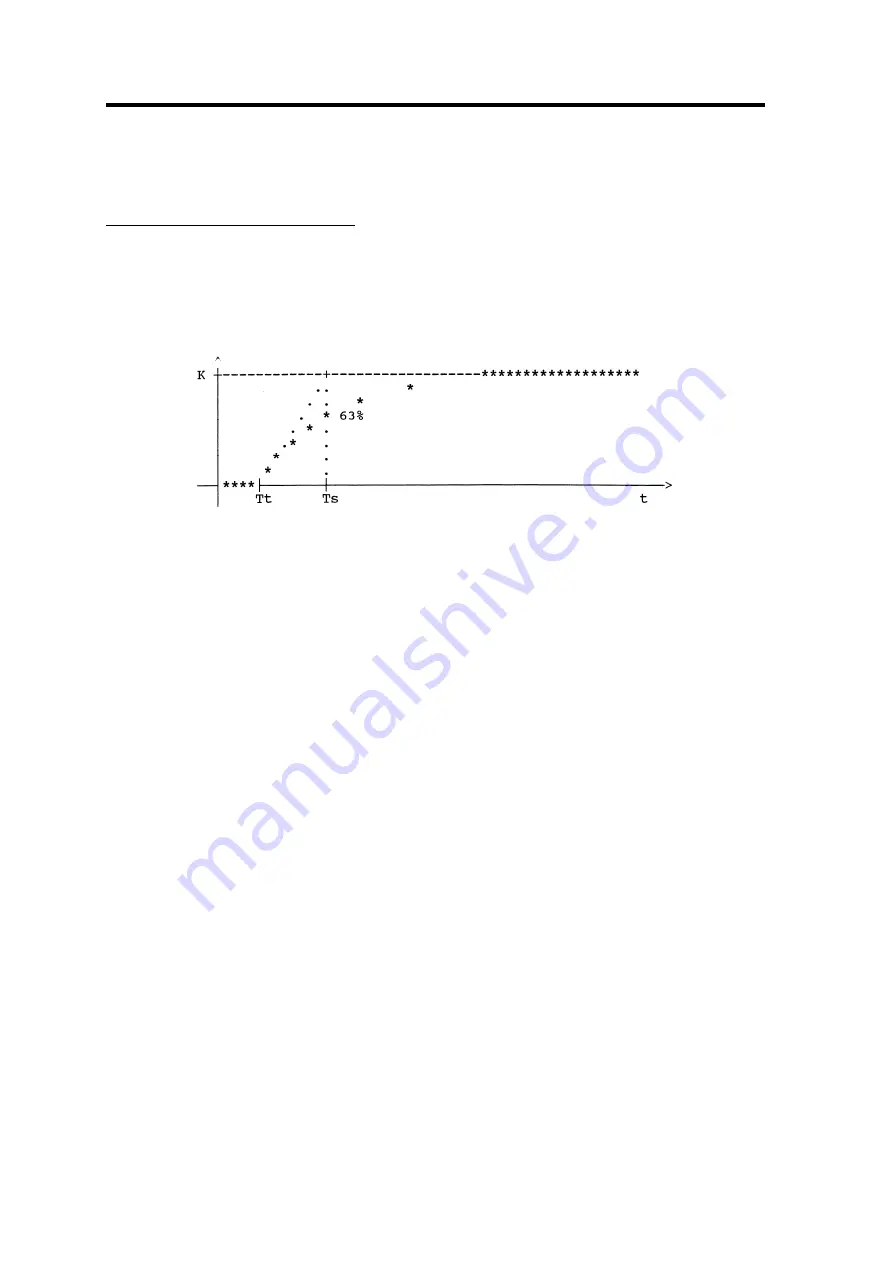
The best procedure to tune the PID controller, is to make the step response of the application,
evaluate the parameters dead time (Tt) and rise time (Ts) and then calculate the PID parameters.
Figure 9
tuning for optimal step response:
- gain =
0.6 / K
- integral action =
1 * Ts
- lead =
0.5 * Tt
tuning for optimal disturbance response:
- gain =
0.95 / K
- integral action =
2.4 * Ts
- lead =
0.42 * Tt
K is the relation of actual pressure to actual total flow, both are to be taken as
percent of full scale.
To improve the speed of your application, first increase the value of the gain parameter, then
change the integral action.
If you cannot record a step response of your process, it is also possible to estimate the necessary
values. Measure the time between the opening of the valves and the beginning change of the
actual pressure as Tt. Then measure the time until pressure has gained 63% of the final pressure
value.
Configuration of an Application(see next page):
18
Содержание 647C
Страница 14: ...1 General 647C 10 This page left blank...