


























2
22
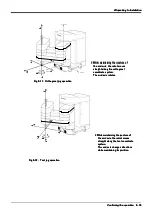
2Unpacking to Installation
Unpacking to Installation
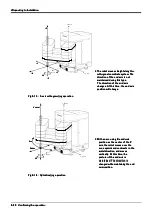
Unpacking to Installation
Unpacking to Installation
Confirming the operation
Confirming the operation
Confirming the operation
Confirming the operation
2-
2-
2-
2-27
27
27
27
(4)
(4)
(4)
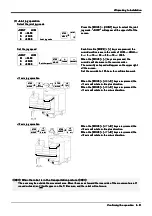
(4) 3-axis XYZ jog operation
3-axis XYZ jog operation
3-axis XYZ jog operation
3-axis XYZ jog operation
Press the [MOVE] + [XYZ] keys, and then
Press the [MOVE] + [XYZ] keys, and then
Press the [MOVE] + [XYZ] keys, and then
Press the [MOVE] + [XYZ] keys, and then
press only the [XYZ] key. "XYZ456" will appear
press only the [XYZ] key. "XYZ456" will appear
press only the [XYZ] key. "XYZ456" will appear
press only the [XYZ] key. "XYZ456" will appear
at the upper left of the screen.
at the upper left of the screen.
at the upper left of the screen.
at the upper left of the screen.
Each time the [MOVE] + [+] keys are pressed,
Each time the [MOVE] + [+] keys are pressed,
Each time the [MOVE] + [+] keys are pressed,
Each time the [MOVE] + [+] keys are pressed,
the override will increase in the order of LOW
the override will increase in the order of LOW
the override will increase in the order of LOW
the override will increase in the order of LOW
→
HIGH
→
3
→
5
→
1
0
→
30
→
50
→
70
→
→
HIGH
→
3
→
5
→
1
0
→
30
→
50
→
70
→
→
HIGH
→
3
→
5
→
1
0
→
30
→
50
→
70
→
→
HIGH
→
3
→
5
→
1
0
→
30
→
50
→
70
→
1
00%. When the [MOVE] + [-] keys are pressed,
1
00%. When the [MOVE] + [-] keys are pressed,
1
00%. When the [MOVE] + [-] keys are pressed,
1
00%. When the [MOVE] + [-] keys are pressed,
the override will decrease in the reverse order.
the override will decrease in the reverse order.
the override will decrease in the reverse order.
the override will decrease in the reverse order.
The currently set speed will appear on the
The currently set speed will appear on the
The currently set speed will appear on the
The currently set speed will appear on the
upper right of the screen. Set the override to
upper right of the screen. Set the override to
upper right of the screen. Set the override to
upper right of the screen. Set the override to
1
0% here for confirmation work.
1
0% here for confirmation work.
1
0% here for confirmation work.
1
0% here for confirmation work.
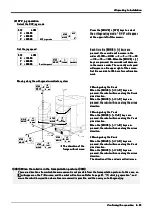
* Moving along the X axis
* Moving along the X axis
* Moving along the X axis
* Moving along the X axis
When the [MOVE] + [+X (J
1
)] keys are
When the [MOVE] + [+X (J
1
)] keys are
When the [MOVE] + [+X (J
1
)] keys are
When the [MOVE] + [+X (J
1
)] keys are
pressed, the robot will move along the X axis
pressed, the robot will move along the X axis
pressed, the robot will move along the X axis
pressed, the robot will move along the X axis
plus direction.
plus direction.
plus direction.
plus direction.
When the [MOVE] + [-X (J
1
)] keys are
When the [MOVE] + [-X (J
1
)] keys are
When the [MOVE] + [-X (J
1
)] keys are
When the [MOVE] + [-X (J
1
)] keys are
pressed, the robot will move along the minus
pressed, the robot will move along the minus
pressed, the robot will move along the minus
pressed, the robot will move along the minus
direction.
direction.
direction.
direction.
* Moving along the Y axis
* Moving along the Y axis
* Moving along the Y axis
* Moving along the Y axis
When the [MOVE] + [+Y(J2)] keys are
When the [MOVE] + [+Y(J2)] keys are
When the [MOVE] + [+Y(J2)] keys are
When the [MOVE] + [+Y(J2)] keys are
pressed, the robot will move along the Y axis
pressed, the robot will move along the Y axis
pressed, the robot will move along the Y axis
pressed, the robot will move along the Y axis
plus direction.
plus direction.
plus direction.
plus direction.
When the [MOVE] + [-Y (J2)] keys are
When the [MOVE] + [-Y (J2)] keys are
When the [MOVE] + [-Y (J2)] keys are
When the [MOVE] + [-Y (J2)] keys are
pressed, the robot will move along the minus
pressed, the robot will move along the minus
pressed, the robot will move along the minus
pressed, the robot will move along the minus
direction.
direction.
direction.
direction.
* Moving along the Z axis
* Moving along the Z axis
* Moving along the Z axis
* Moving along the Z axis
When the [MOVE] + [+Z (J3)] keys are
When the [MOVE] + [+Z (J3)] keys are
When the [MOVE] + [+Z (J3)] keys are
When the [MOVE] + [+Z (J3)] keys are
pressed, the robot will move along the Z axis
pressed, the robot will move along the Z axis
pressed, the robot will move along the Z axis
pressed, the robot will move along the Z axis
plus direction.
plus direction.
plus direction.
plus direction.
When the [MOVE] + [-Z (J3)] keys are
When the [MOVE] + [-Z (J3)] keys are
When the [MOVE] + [-Z (J3)] keys are
When the [MOVE] + [-Z (J3)] keys are
pressed, the robot will move along the minus
pressed, the robot will move along the minus
pressed, the robot will move along the minus
pressed, the robot will move along the minus
direction.
direction.
direction.
direction.
XYZ456
XYZ456
XYZ456
XYZ456 LOW
LOW
LOW
LOW
X +
1
34.50
X +
1
34.50
X +
1
34.50
X +
1
34.50
Y +220.00
Y +220.00
Y +220.00
Y +220.00
Z +280.00
Z +280.00
Z +280.00
Z +280.00
Select the 3-axis
Select the 3-axis
Select the 3-axis
Select the 3-axis XYZ
XYZ
XYZ
XYZ jog mode
jog mode
jog mode
jog mode
XYZ456
XYZ456
XYZ456
XYZ456 LOW
LOW
LOW
LOW
X +
1
34.50
X +
1
34.50
X +
1
34.50
X +
1
34.50
Y +220.00
Y +220.00
Y +220.00
Y +220.00
Z +280.00
Z +280.00
Z +280.00
Z +280.00
Set the jog speed
Set the jog speed
Set the jog speed
Set the jog speed
+
+
+
+
3-axis orthognal jog mode
3-axis orthognal jog mode
3-axis orthognal jog mode
3-axis orthognal jog mode
STEP
STEP
STEP
STEP
MOVE
MOVE
MOVE
MOVE
XYZ
XYZ
XYZ
XYZ
$":
$":
$":
$":
Set the soeed
Set the soeed
Set the soeed
Set the soeed
+
+
+
+
STEP
STEP
STEP
STEP
MOVE
MOVE
MOVE
MOVE
+
+
+
+
FORWD
FORWD
FORWD
FORWD
-
-
-
-
BACKWD
BACKWD
BACKWD
BACKWD
XYZ
XYZ
XYZ
XYZ
$":
$":
$":
$":
+
X axis
+
Y axis
+
Z axis
+X
+X
+X
+X
-X
-X
-X
-X
-Y
-Y
-Y
-Y
+Y
+Y
+Y
+Y
+Z
+Z
+Z
+Z
-Z
-Z
-Z
-Z
Moving along the orthogonal coordinate system
Moving along the orthogonal coordinate system
Moving along the orthogonal coordinate system
Moving along the orthogonal coordinate system
*
The direction of the
*
The direction of the
*
The direction of the
*
The direction of the
frange will not move.
frange will not move.
frange will not move.
frange will not move.
+
+
+
+
STEP
STEP
STEP
STEP
MOVE
MOVE
MOVE
MOVE
+Z
+Z
+Z
+Z
(J3)
(J3)
(J3)
(J3)
8
88
8
,@
\
,@
\
,@
\
,@
\
+
+
+
+
STEP
STEP
STEP
STEP
MOVE
MOVE
MOVE
MOVE
-Z
-Z
-Z
-Z
(J3)
(J3)
(J3)
(J3)
3
33
3
JKL
JKL
JKL
JKL
+
+
+
+
STEP
STEP
STEP
STEP
MOVE
MOVE
MOVE
MOVE
-Y
-Y
-Y
-Y
(J2)
(J2)
(J2)
(J2)
4
4
4
4
MNO
MNO
MNO
MNO
+X
+X
+X
+X
(J
1
)
(J
1
)
(J
1
)
(J
1
)
’; ^
’; ^
’; ^
’; ^
+
+
+
+
STEP
STEP
STEP
STEP
MOVE
MOVE
MOVE
MOVE
+Y
+Y
+Y
+Y
(J2)
(J2)
(J2)
(J2)
9
9
9
9
&<>
&<>
&<>
&<>
+
+
+
+
STEP
STEP
STEP
STEP
MOVE
MOVE
MOVE
MOVE
+
+
+
+
STEP
STEP
STEP
STEP
MOVE
MOVE
MOVE
MOVE
-X
-X
-X
-X
(J
1
)
(J
1
)
(J
1
)
(J
1
)
SPACE
SPACE
SPACE
SPACE
PQR
PQR
PQR
PQR
◇◆◇
Jog mode will change when only [XYZ] key is pressed again
◇◆◇
◇◆◇
Jog mode will change when only [XYZ] key is pressed again
◇◆◇
◇◆◇
Jog mode will change when only [XYZ] key is pressed again
◇◆◇
◇◆◇
Jog mode will change when only [XYZ] key is pressed again
◇◆◇
When the [MOVE] + [XYZ] keys are pressed and then only the [XYZ] key is pressed, the upper left display will
When the [MOVE] + [XYZ] keys are pressed and then only the [XYZ] key is pressed, the upper left display will
When the [MOVE] + [XYZ] keys are pressed and then only the [XYZ] key is pressed, the upper left display will
When the [MOVE] + [XYZ] keys are pressed and then only the [XYZ] key is pressed, the upper left display will
change in the order of "ORTHOGONAL(X,Y,Z)"
→
"3-AXIS ORTHOGONAL(XYZ456)"
→
"CYLINDRICAL
change in the order of "ORTHOGONAL(X,Y,Z)"
→
"3-AXIS ORTHOGONAL(XYZ456)"
→
"CYLINDRICAL
change in the order of "ORTHOGONAL(X,Y,Z)"
→
"3-AXIS ORTHOGONAL(XYZ456)"
→
"CYLINDRICAL
change in the order of "ORTHOGONAL(X,Y,Z)"
→
"3-AXIS ORTHOGONAL(XYZ456)"
→
"CYLINDRICAL
(CYLNDER)
(CYLNDER)
(CYLNDER)
(CYLNDER)". Each jog mode can be selected.
". Each jog mode can be selected.
". Each jog mode can be selected.
". Each jog mode can be selected.
◇◆◇
The end axis posture cannot be maintained with 3-axis orthogonal jog.
◇◆◇
◇◆◇
The end axis posture cannot be maintained with 3-axis orthogonal jog.
◇◆◇
◇◆◇
The end axis posture cannot be maintained with 3-axis orthogonal jog.
◇◆◇
◇◆◇
The end axis posture cannot be maintained with 3-axis orthogonal jog.
◇◆◇
With 3-axis orthogonal jog, the end axis posture (orientation) is not maintained when moving linearly in the X, Y
With 3-axis orthogonal jog, the end axis posture (orientation) is not maintained when moving linearly in the X, Y
With 3-axis orthogonal jog, the end axis posture (orientation) is not maintained when moving linearly in the X, Y
With 3-axis orthogonal jog, the end axis posture (orientation) is not maintained when moving linearly in the X, Y
or Z axis direction. Use orthogonal jog to maintain the posture.
or Z axis direction. Use orthogonal jog to maintain the posture.
or Z axis direction. Use orthogonal jog to maintain the posture.
or Z axis direction. Use orthogonal jog to maintain the posture.































































