





























11 Buffer Memory (Parameters & Monitored Data)
11.1 Positioning Parameters
204
FX
3U
-20SSC-H Positioning Block User's Manual
11. Buffer Memory (Parameters & Monitored Data)
11.1
Positioning Parameters
The positioning parameters to set speed and units of measurement.
The BFMs in positioning parameters are readable/writable.
→
For the parameter setting method, refer to Section 7.1
For X-axis: BFM #14000 to #14199
For Y-axis: BFM #14200 to #14399
Caution
Do not use unlisted BFMs for changing values not described in this section.
Timing at which positioning parameters are reflected in operations
• When the power is turned ON, positioning parameters stored in the flash memory are transferred to the
BFM, and the transferred positioning parameters become valid.
• If positioning parameters are changed in a sequence program, the changed positioning parameters will
become valid from the next positioning operation when the positioning parameter enable command (b4 of
BFM #519/619) is set to ON from OFF.
→
For details of the positioning parameter enable command, refer to Subsection 11.4.1
→
For the positioning parameter update method, refer to Subsection 7.1.7
• When positioning parameters are set in FX Configurator-FP and written to the 20SSC-H, the written
positioning parameters will become valid from the next positioning operation.
→
For setting of parameters, refer to Subsection 7.1.2
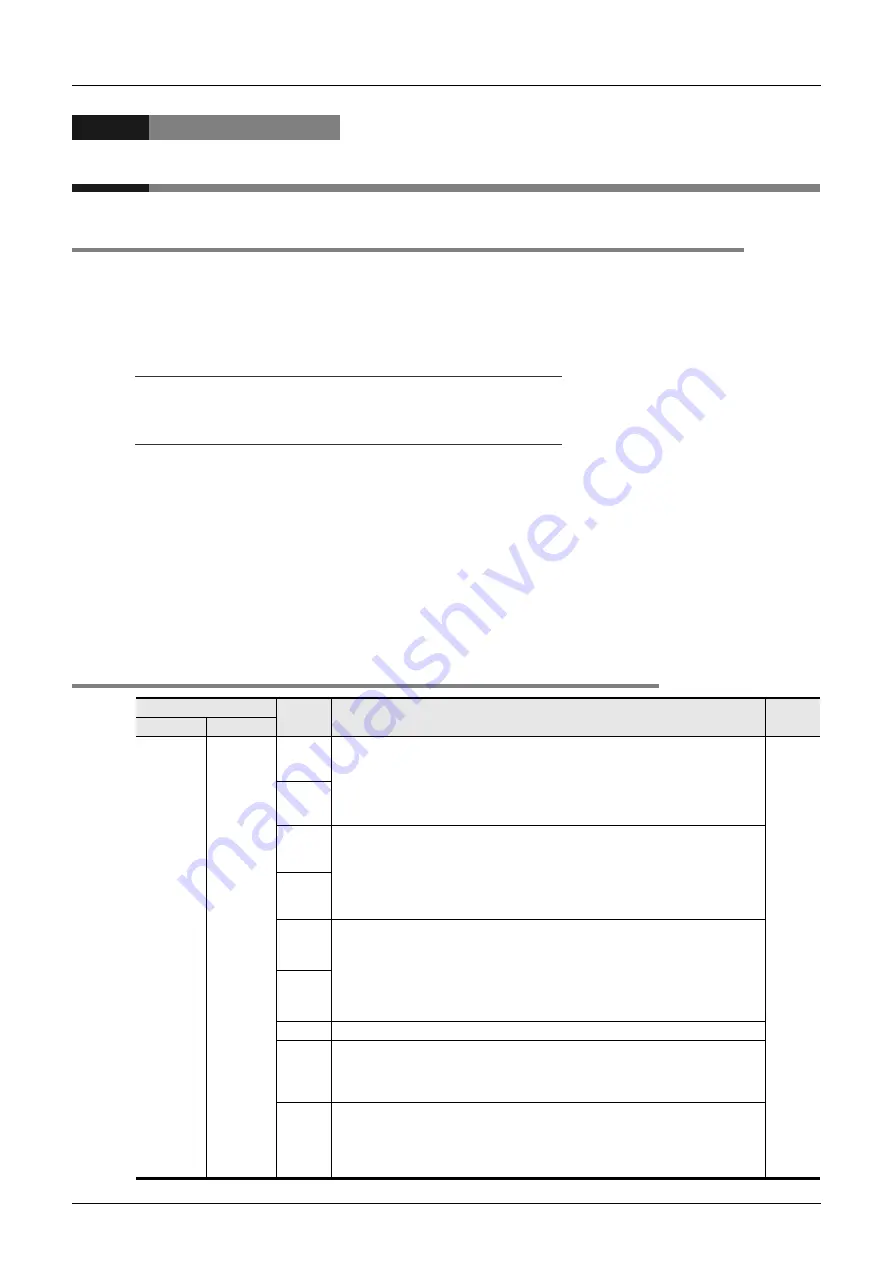
11.1.1
Operation parameters 1 [BFM #14000, BFM #14200]
BFM Number
Bit
Number
Description
Default
X-axis
Y-axis
BFM
#14000
BFM
#14200
b0
System of units (user unit)
*1
(b1,b0)=00: motor system
(b1,b0)=01: mechanical system
(b1,b0)=10: composite system
(b1,b0)=11: composite system
H0000
b1
b2
User unit setting
*1
(b3,b2)=00:
µ
m, cm/min
(b3,b2)=01: 10
-4
inch, inch/min
(b3,b2)=10: mdeg, 10deg/min
(b3,b2)=11: not available
b3
b4
Position data magnification
*2
Position data can be multiplied by 1, 10, 100, and 1000 times.
(b5,b4)=00: 1 time
(b5,b4)=01: 10 times
(b5,b4)=10: 100 times
(b5,b4)=11: 1000 times
b5
b6 to b9
Not available
b10
Zero return direction
1: In zero return, starts operation toward the increasing current value direction.
0: In zero return, starts operation toward the decreasing current value direction.
→
For details on the zero return operation, refer to Section 8.1
b11
Acceleration/deceleration mode
1: Operates in approximate S-shaped acceleration/deceleration.
(Trapezoidal ACC/DEC in interpolations)
0: Operates in trapezoidal acceleration/deceleration.
→
For details on the acceleration/deceleration mode, refer to Section 7.2







































































