





























8 COMMUNICATION FUNCTION (MITSUBISHI ELECTRIC AC SERVO PROTOCOL) [A]
8.3 Protocol
403
8
Error codes
Error codes are used in the following cases and an error code of single-code length is transmitted.
Once the data from the master station is received, the slave station sends the corresponding error code to the master station.
An error code sent in upper case indicates that the servo is in a normal state, and one in lower case indicates that an alarm
has occurred on the servo.
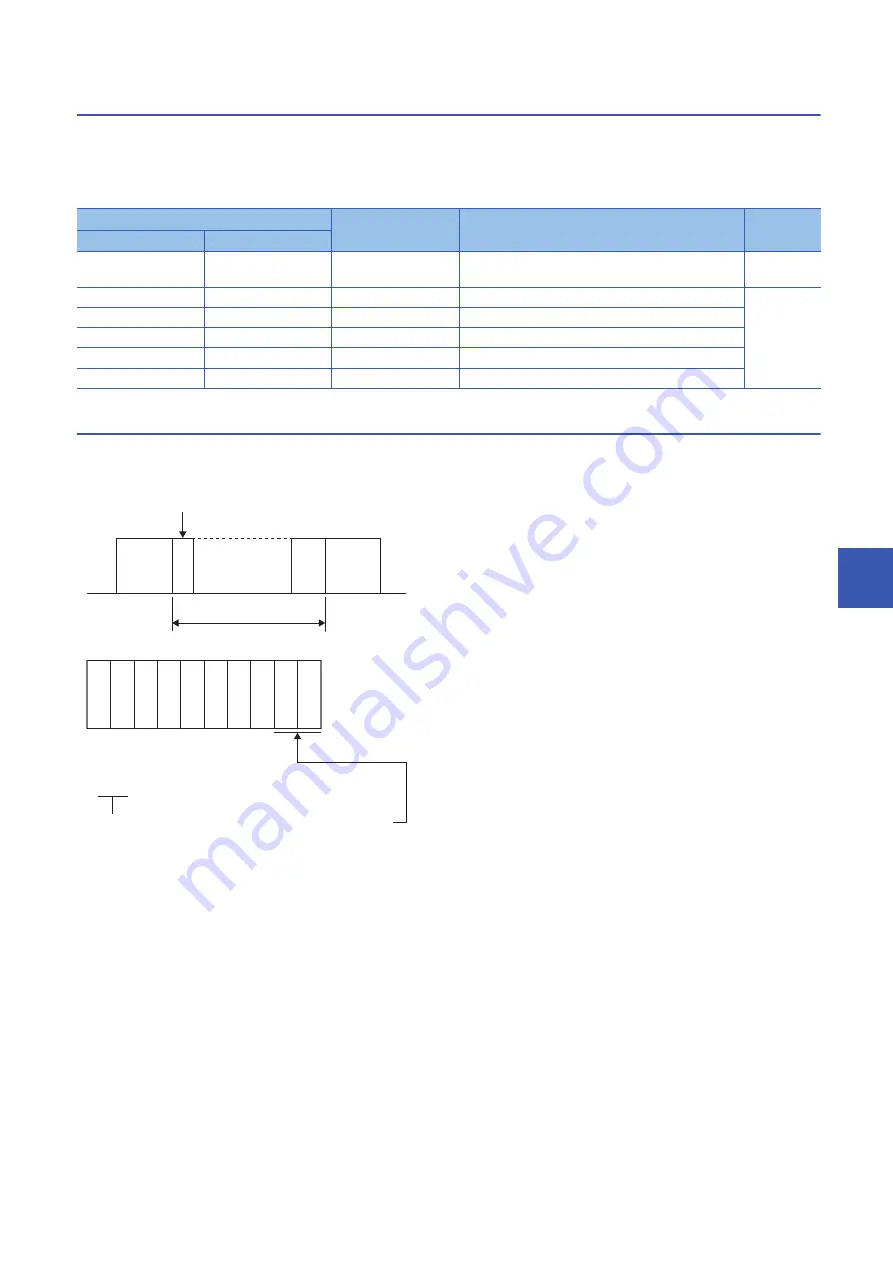
Checksum
The checksum is an ASCII-coded hexadecimal representing the last two digits of the sum of ASCII-coded hexadecimal
numbers up to ETX, with the exception of the first control code (STX or SOH).
Error code
Error name
Explanation
Remark
In normal state
At alarm occurrence
[A]
[a]
Normal
Transmitted data was processed normally.
Positive
response
[B]
[b]
Parity error
A parity error occurred in the transmitted data.
Negative
response
[C]
[c]
Checksum error
A checksum error occurred in the transmitted data.
[D]
[d]
Character error
An unsupported character was transmitted.
[E]
[e]
Command error
An unsupported command was transmitted.
[F]
[f]
Data No. error
An unsupported data No. was transmitted.
STX
or
SOH
Checksum
Checksum range
Station No.
ETX
[5]
[2]
30H + 41H + 31H + 32H + 35H + 46H + 03H
= 152H
[0] [A] [1]
[F]
[5] [2]
02H 30H 41H 31H 32H 35H 46H 03H
STX
ETX
Lower 2 digits 52 is sent after conversion into ASCII code [5] [2].







































































