





























6 FUNCTIONAL SAFETY
6.4 Safety sub-function
363
6
■
Electronic dynamic brake stop (EDB)
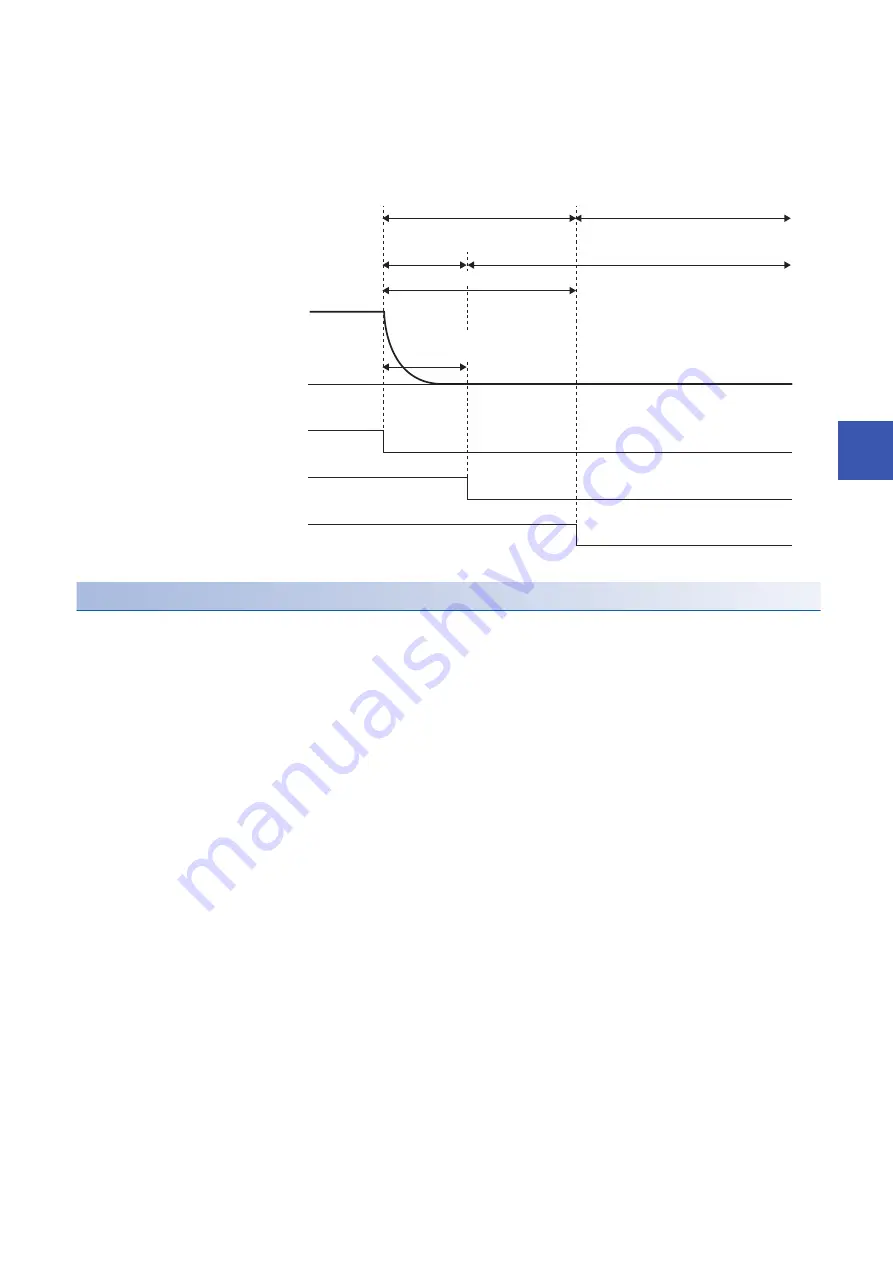
When the SS1 function is activated, the electronic dynamic brake stop is executed. The dynamic brake is activated when the
elapsed time from the start of the SS1 function reaches the time set in [Pr. PF12 Electronic dynamic brake operating time]. If
the value set in [Pr. PSA03 SS1/SS2 deceleration monitor time] is shorter than that of [Pr. PF12], the dynamic brake will be
activated when the elapsed time reaches [Pr. PSA03].
Setting functional safety parameters
Refer to the following to set the functional safety parameters.
Page 340 Functional safety parameters that must be set
When using the safety sub-function control by input device, refer to the following.
When using output devices, refer to the following.
When using the safety sub-function control by network, refer to the following.
Page 350 Safety sub-function control by network
Since the SS1 function is used for an emergency stop when an error is detected in the diagnosis, set the time required for the
servo motor to stop in [Pr. PSA03 SS1/SS2 deceleration monitor time].
ON
0 r/min
(mm/s)
ON
OFF
Servo motor speed
SS1C (SS1 command)
ON (disabled)
OFF (enabled)
Base circuit
(energy supply to
servo motor)
STOS (STO output)
Stop with electronic
dynamic brake
Electronic dynamic brake
operating time
Stop with dynamic brake
STO state
SS1 in progress
SS1/SS2 deceleration monitor time
OFF (shut-off)