



























62
6 SERVO MOTOR DRIVING
6.1 Homing mode (hm)
6
SERVO MOTOR DRIVING
6.1
Homing mode (hm)
Before performing the home position return, make sure that the limit switch operates.
Check the home position return direction. An incorrect setting will cause a reverse running.
Check the input polarity of the proximity dog. Otherwise, it may cause an unexpected operation.
For home position return when used in the linear servo motor control mode, refer to section 14.3 of "MR-J4-
_GF_(-RJ) Servo Amplifier Instruction Manual (Motion Mode)".
For home position return when used in the direct drive motor control mode, refer to "MR-J4-_GF_(-RJ) Servo
Amplifier Instruction Manual (Motion Mode)".
For home position return when used in the fully closed loop control mode, refer to section 16.3 of "MR-J4-
_GF_(-RJ) Servo Amplifier Instruction Manual (Motion Mode)".
To execute a home position return securely, start a home position return after moving the linear servo motor to
the opposite stroke end.
This section describes how to perform a home position return operation in the communication.
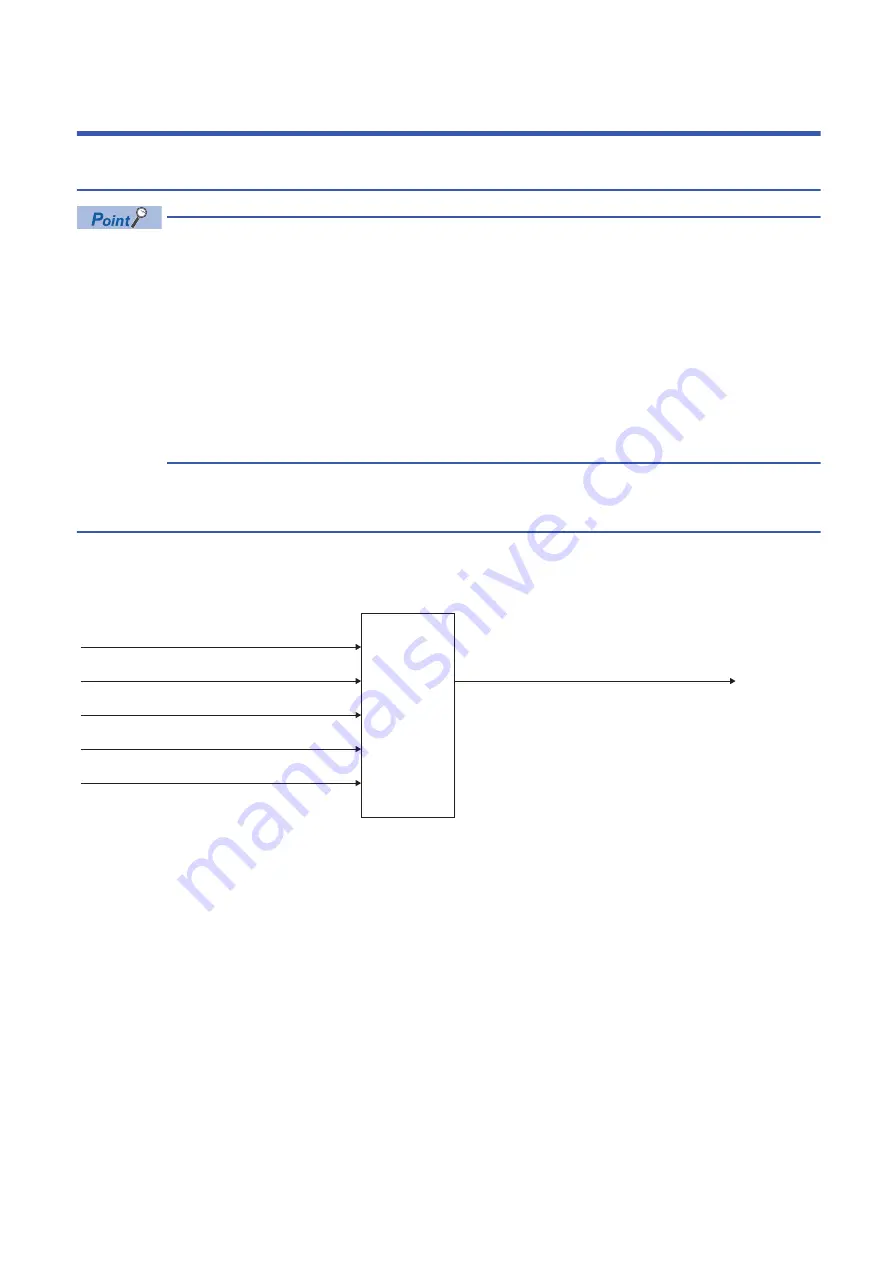
Function explanation
For specified home position return operation, set Homing method (6098h), Homing speed (6099h), and Homing acceleration
(609Ah), and then start the operation with Controlword (6040h). The completion of the home position return operation can be
checked with Statusword (6041h).
Controlword (6040h)
Homing acceleration (609Ah)
Homing method (6098h)
Homing speeds (6099h)
Home offset (607Ch)
Homing
method
Statusword (6041h)