




























3 SIGNALS AND WIRING
3.5 Signal (device) explanation
75
3
■
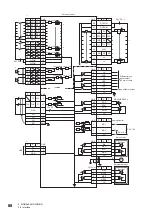
LOP (Control switching)
• Position/speed control switching mode
This is used to select the position control mode or the speed control mode in the position/speed control switching mode.
• Speed/torque control switching mode
This is used to select the speed control mode or the torque control mode in the speed/torque control switching mode.
• Torque/position control switching mode
This is used to select the position control mode or the speed control mode in the torque/position control switching mode.
■
STAB2 (Second acceleration/deceleration selection)
This is used to select the acceleration/deceleration time constants while the servo motor rotates in the speed control mode or
torque control mode. The S-pattern acceleration/deceleration time constants are always uniform.
■
ABSM (ABS transfer mode)
This is an ABS transfer mode request device. If [Pr. PA03.0] is set to "1" and an absolute position detection system by DIO is
selected, ABSM will be assigned to the CN3-17 pin.
Page 263 ABSOLUTE POSITION DETECTION SYSTEM
■
ABSR (ABS request)
This is an ABS request device. If [Pr. PA03.0] is set to "1" and the absolute position detection system by DIO is selected,
ABSR will be assigned to the CN3-18 pin.
Page 263 ABSOLUTE POSITION DETECTION SYSTEM
■
PEN (command input permission signal)
If PEN is selected as an input device, command pulse trains are accepted while PEN is on.
Available on servo amplifiers with firmware version A5 or later.
■
MECR (motor-side/load-side deviation counter clear)
Turning on MECR clears the values of the motor-side/load-side position deviation counter at the signal rising edge.
• This device can be used in the fully closed loop control mode.
• The droop pulses in the position control will not be affected.
• The operation will not be affected even if this device is turned on while the semi closed loop control is in progress.
• The operation will not be affected even if this device is turned on while the fully closed loop control error detection function
is disabled in [Pr. PE03].
Available on servo amplifiers with firmware version A5 or later.
LOP
Control mode
0 (off)
Position control mode
1 (on)
Speed control mode
LOP
Control mode
0 (off)
Speed control mode
1 (on)
Torque control mode
LOP
Control mode
0 (off)
Torque control mode
1 (on)
Position control mode
STAB2
Acceleration/deceleration time constants
0 (off)
[Pr. PC01]/[Pr. PC02]
1 (on)
[Pr. PC30]/[Pr. PC31]
Содержание Melservo-J5 MR-J5 Series
Страница 1: ...MR J5 User s Manual Hardware MR J5 _G_ MR J5W_ _G_ MR J5 _A_ Mitsubishi Electric AC Servo System ...
Страница 2: ......
Страница 441: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 439 12 MEMO ...
Страница 445: ......







































































