






















6
1 FUNCTIONS AND CONFIGURATION
1.1 Outline
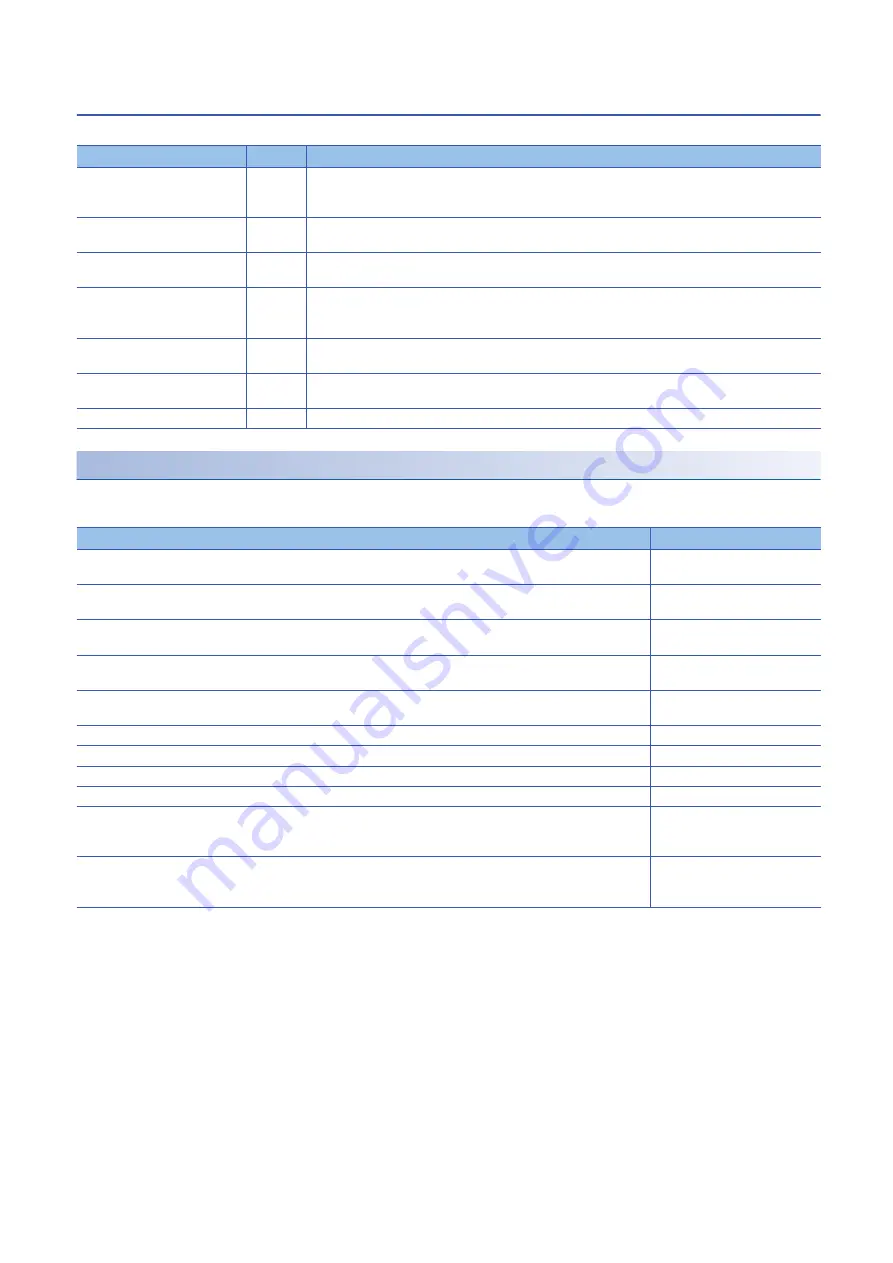
Control mode
The servo amplifier supports the following control modes.
Satisfied standards
The servo amplifiers comply with the standards shown below. For the descriptions which are not in this manual, refer to the
following standards.
Control mode
Symbol
Description
Cyclic synchronous position mode
csp
This is a control mode to drive servo motors by receiving a position command cyclically via either
synchronous or asynchronous communication with a controller.
Use an absolute position address for the command.
Cyclic synchronous velocity mode
csv
This is a control mode to drive servo motors by receiving a speed command cyclically via either synchronous
or asynchronous communication with a controller.
Cyclic synchronous torque mode
cst
This is a control mode to drive servo motors by receiving a torque command cyclically via either synchronous
or asynchronous communication with a controller.
Profile position mode
pp
This is a positioning mode to drive servo motors by receiving an end position command via either
synchronous or asynchronous communication with a controller.
Use an absolute position address or a relative position address for the command.
Profile velocity mode
pv
This is a control mode to drive servo motors by receiving a target speed command via either synchronous or
asynchronous communication with a controller.
Profile torque mode
tq
This is a control mode to drive servo motors by receiving a target torque command via either synchronous or
asynchronous communication with a controller.
Homing mode
hm
This is a control mode to perform homing with the method specified by the controller.
Standards
Version
ETG.1000.2 EtherCAT Specification - Part2
Physical Layer service definition and protocol specification
V1.0.4
ETG.1000.3 EtherCAT Specification - Part3
Data Link Layer service definition
V1.0.4
ETG.1000.4 EtherCAT Specification - Part4
Data Link Layer protocol specification
V1.0.4
ETG.1000.5 EtherCAT Specification - Part5
Application Layer service definition
V1.0.4
ETG.1000.6 EtherCAT Specification - Part6
Application Layer protocol specification
V1.0.4
ETG.1020 EtherCAT Protocol Enhancements
V1.2.0
ETG.1300 EtherCAT Indicator and Labeling Specification
V1.1.1
ETG.2000 EtherCAT Slave Information (ESI) Specification
V1.0.10
ETG.6010 Implementation Directive for CiA 402 Drive Profile
V1.1.0
IEC 61800-7-201 Adjustable speed electrical power drive systems –
Part 7-201: Generic interface and use of profiles for power drive systems –
Profile type 1 specification
Edition 2.0
Adjustable speed electrical power drive systems –
Part 7-301: Generic interface and use of profiles for power drive systems –
Mapping of profile type 1 to network technologies
Edition 2.0
Содержание MELSERVO-J5 MR-J5-G-N1
Страница 2: ......
Страница 24: ...22 6 SYNCHRONIZATION 6 2 Synchronous mode DC mode MEMO ...
Страница 47: ...9 MANUFACTURER SPECIFIC FUNCTION 9 1 Torque limit selection 45 9 MEMO ...
Страница 51: ......







































































