





























238
6 NORMAL GAIN ADJUSTMENT
6.3 Auto tuning
Auto tuning mode basis
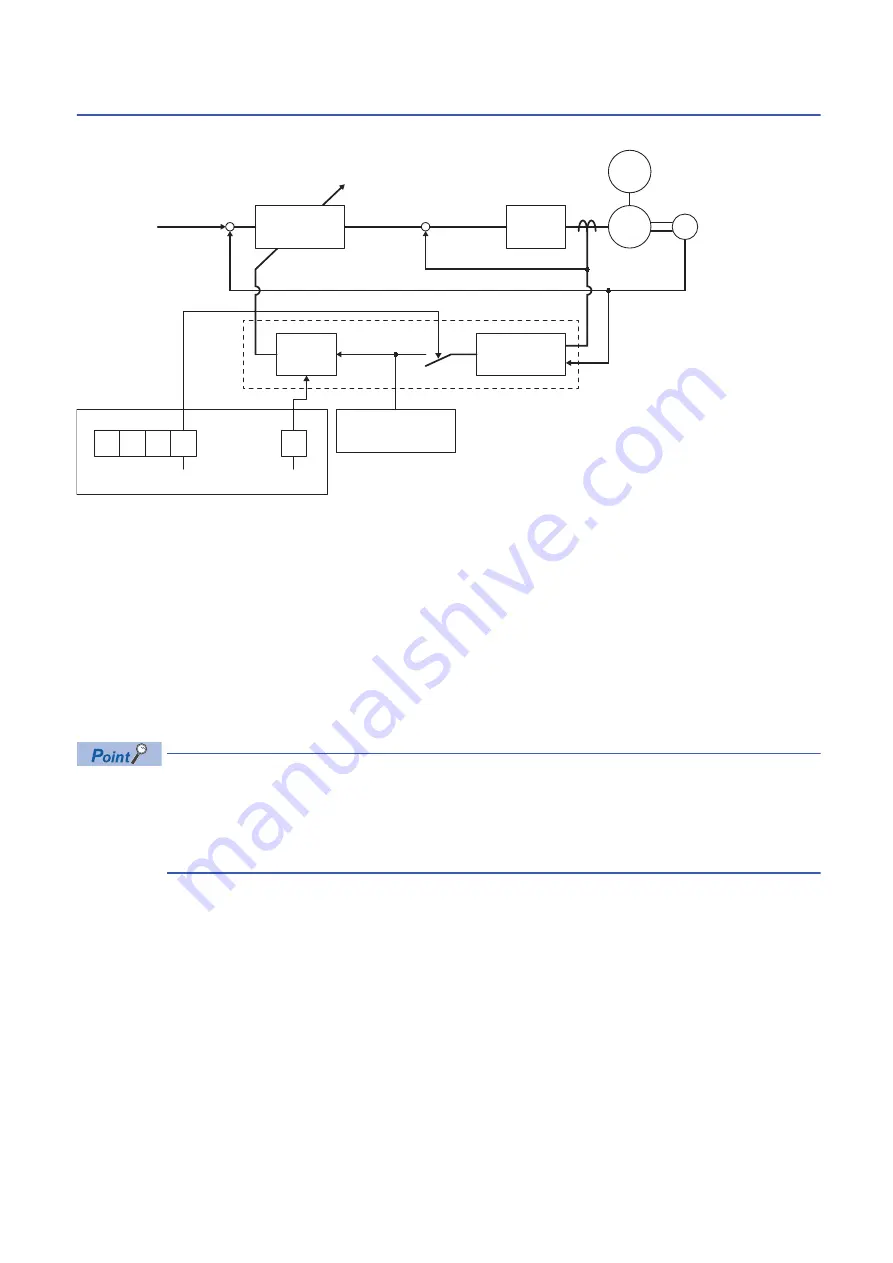
The block diagram of real-time auto tuning is shown below.
When a servo motor is accelerated/decelerated, the load to motor inertia ratio estimation section always estimates the load to
motor inertia ratio from the current and speed of the servo motor. The results of estimation are written to [Pr. PB06 Load to
motor inertia ratio/load to motor mass ratio]. These results can be confirmed on the status display screen of the MR
Configurator2.
If you have already known the value of the load to motor inertia ratio or failed to estimate, set "Gain adjustment mode
selection" to "Auto tuning mode 2 (_ _ _ 2)" in [Pr. PA08] to stop the estimation (turning off the switch in above diagram), and
set the load to motor inertia ratio ([Pr. PB06]) manually.
From the preset load to motor inertia ratio ([Pr. PB06]) value and response ([Pr. PA09]), the optimum loop gains are
automatically set on the basis of the internal gain table.
The auto tuning results are saved in the EEP-ROM of the servo amplifier every 60 minutes since power-on. At power-on, auto
tuning is performed with the value of each loop gain saved in the EEP-ROM being used as an initial value.
• If sudden disturbance torque is imposed during operation, the load to motor inertia ratio may be
misestimated temporarily. In such a case, set "Gain adjustment mode selection" to "Auto tuning mode 2 (_ _
_ 2)" in [Pr. PA08] and then set the correct load to motor inertia ratio in [Pr. PB06].
• When any of the auto tuning mode 1 and auto tuning mode settings is changed to the manual mode 2
setting, the current loop gains and load to motor inertia ratio estimation value are saved in the EEP-ROM.
Loop gain
PG1, PG2,
VG2, VIC
Current
control
Load to motor
inertia ratio
estimation section
Gain table
[Pr. PB06 Load to
motor inertia ratio/
load to motor mass ratio]
Response
level setting
Gain adjustment mode selection
[Pr. PA08]
+
-
+
-
Real-time
auto tuning section
Set 0 or 1 to turn on.
Switch
Current feedback
Position/speed
feedback
Speed feedback
Load moment
of inertia
Encoder
Command
Automatic setting
[Pr. PA09]
M
Servo motor
0 0 0
Содержание MELSERVO-J4 series
Страница 2: ......
Страница 605: ...APPX Appendix 6 EC declaration of conformity 603 A ...
Страница 638: ...636 APPX Appendix 14 Encoder output pulse setting method MEMO ...
Страница 645: ......







































































