





























140
5.2.5
OPR basic parameters
(1) [Pr.43] OPR method
Set the "OPR method" for carrying out machine OPR.
Refer to
Page 318, Section 8.2 for details on the OPR methods.
(2) OPR method
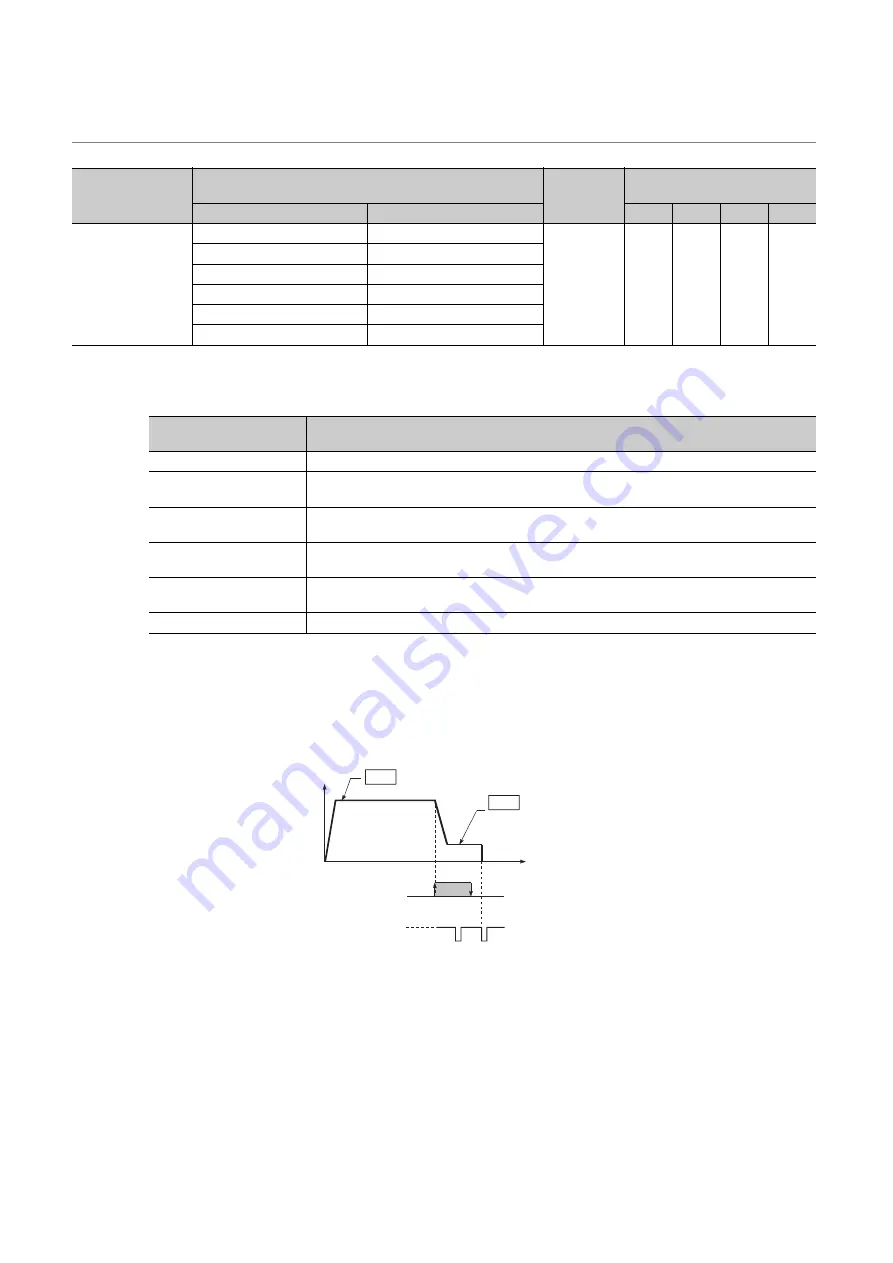
(a) 0: Near-point dog method
1.
Start machine OPR. (Start movement at the "[Pr.46] OPR speed" in the "[Pr.44] OPR direction".)
2.
The machine begins decelerating when the near-point dog ON is detected.
3.
The machine decelerates to the "[Pr.47] Creep speed", and subsequently moves at that speed. (At
this time, the near-point dog must be ON. If the near-point dog is OFF, the machine will decelerate
to a stop.)
4.
At the first zero signal (one pulse output at one motor revolution) after the near-point dog OFF, the
pulse output from the LD75 stops, and the machine OPR is completed.
Item
Setting value, setting range
Default value
Setting value buffer memory
address
Value set with GX Works2
Value set with program
Axis 1
Axis 2
Axis 3
Axis 4
[Pr.43] OPR method
0: Near-point dog method
0
0
70
220
370
520
1: Stopper method 1)
1
2: Stopper method 2)
2
3: Stopper method 3)
3
4: Count method 1)
4
5: Count method 2)
5
Selection of [Pr.43] OPR
method
OPR operation
0: Near-point dog method
After decelerating at the near-point dog ON, stop at the zero signal and complete the machine OPR.
1: Stopper method 1)
After decelerating at the near-point dog ON, stop with the stopper, and complete the machine OPR after the
dwell time has passed.
2: Stopper method 2)
After decelerating at the near-point dog ON, stop with the stopper, and complete the machine OPR with the
zero signal.
3: Stopper method 3)
After starting with the creep speed, stop with the stopper, and complete the machine OPR with the zero
signal.
4: Count method 1)
After decelerating at the near-point dog ON, move the designated distance, and complete the machine OPR
with the zero signal.
5: Count method 2)
After decelerating at the near-point dog ON, move the designated distance, and complete the machine OPR.
t
1.
2.
3.
4.
ON
OFF
V
Near-point dog
Zero signal
OPR speed
Pr.46
Pr.47
Creep speed
Содержание MELSEC-L LD75D
Страница 1: ...MELSEC L LD75P LD75D Positioning Module User s Manual LD75P1 LD75P2 LD75P4 LD75D1 LD75D2 LD75D4 ...
Страница 2: ......
Страница 11: ...9 Memo ...
Страница 47: ...45 CHAPTER 2 SYSTEM CONFIGURATION 2 2 1 General Image of System 1 When connected to a CPU module ...
Страница 176: ...174 ...
Страница 264: ...262 ...
Страница 266: ...264 ...
Страница 267: ...265 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 268: ...266 ...
Страница 269: ...267 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 270: ...268 ...
Страница 271: ...269 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 272: ...270 Z ABRST1 instruction execution ...
Страница 273: ...271 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 278: ...276 ...
Страница 279: ...277 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 280: ...278 ...
Страница 281: ...279 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 282: ...280 ...
Страница 283: ...281 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 284: ...282 ...
Страница 285: ...283 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 286: ...284 ...
Страница 287: ...285 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Страница 316: ...314 Memo ...
Страница 685: ...683 APPENDICES A Appendix 1 Function Update Appendix 1 1 Function comparison Memo ...
Страница 738: ...736 Memo ...
Страница 806: ...804 5 LD75D2 Unit mm 6 LD75D4 Unit mm 45 4 90 4 95 4 45 45 DIN rail center 45 4 90 4 95 4 45 45 DIN rail center ...
Страница 817: ......







































































