





























12 DATA USED FOR POSITIONING CONTROL
12.4 Positioning Data
423
12
• When JUMP instruction is set for the control method, the setting values in [Da.9] Dwell time and [Da.10] M
code differ from the values when another control method is set.
• When LOOP is set for the control method, the setting value in [Da.10] M code differs from the value when
another control method is set.
• When degree is set in [Pr.1] Unit setting, the circular interpolation control and 3-axis helical interpolation
control cannot be executed. Circular interpolation not possible (Error code: 199FH) occurs when the control
is executed.
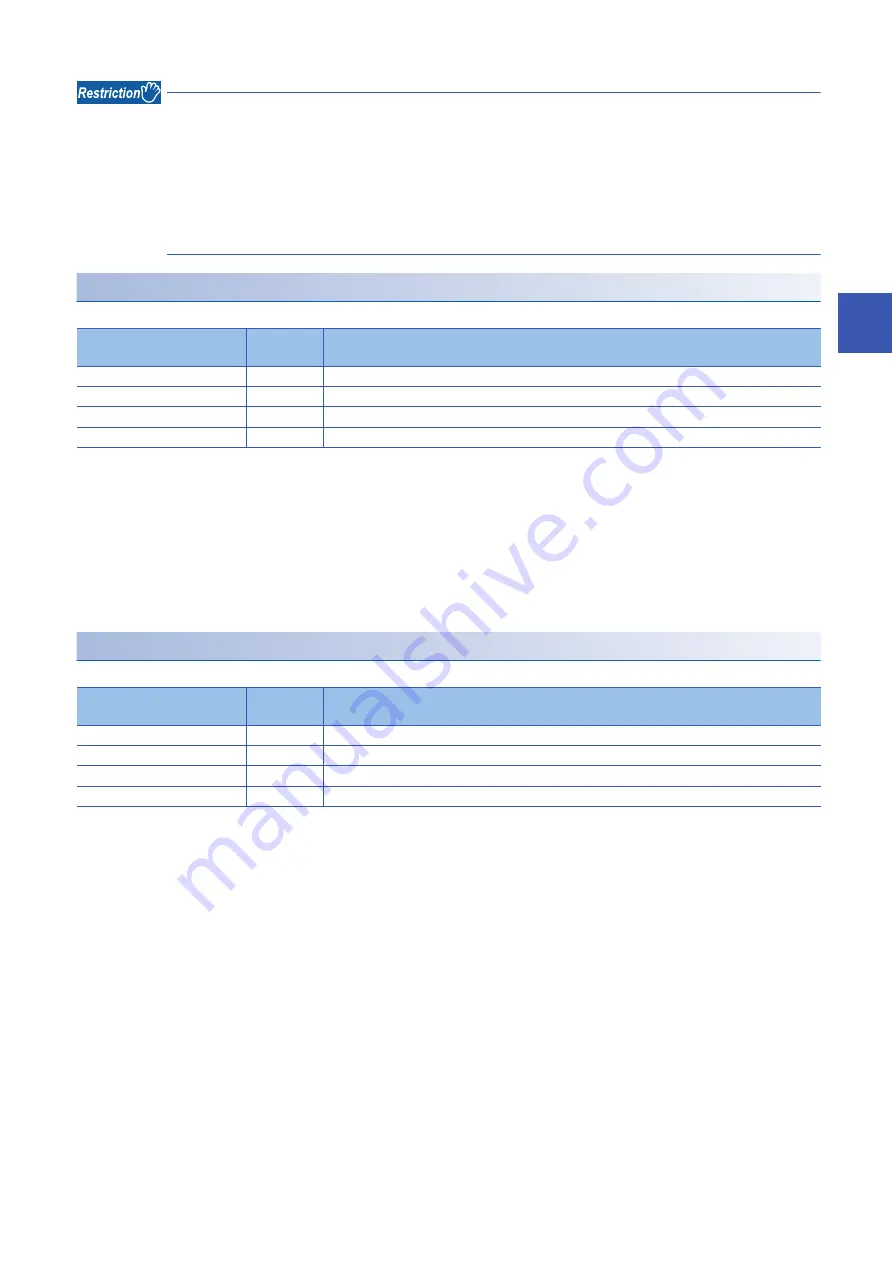
[Da.3] Acceleration time No.
Set which of Acceleration time 0 to 3 to use for the acceleration time during positioning.
For the setting, refer to the following and check the assignment of this area.
Page 421 Configuration of positioning identifier
■
Buffer memory address
For the buffer memory address of this area, refer to the following.
■
Default value
The default value is 00 for all the axes.
[Da.4] Deceleration time No.
Set which of Deceleration time 0 to 3 to use for the deceleration time during positioning.
For the setting, refer to the following and check the assignment of this area.
Page 421 Configuration of positioning identifier
■
Buffer memory address
For the buffer memory address of this area, refer to the following.
■
Default value
The default value is 00 for all the axes.
Acceleration time No.
Setting
value
Description
Acceleration time 0
00
Uses the value set in [Pr.9] Acceleration time 0.
Acceleration time 1
01
Uses the value set in [Pr.25] Acceleration time 1.
Acceleration time 2
10
Uses the value set in [Pr.26] Acceleration time 2.
Acceleration time 3
11
Uses the value set in [Pr.27] Acceleration time 3.
Deceleration time No.
Setting
value
Description
Deceleration time 0
00
Uses the value set in [Pr.10] Deceleration time 0.
Deceleration time 1
01
Uses the value set in [Pr.28] Deceleration time 1.
Deceleration time 2
10
Uses the value set in [Pr.29] Deceleration time 2.
Deceleration time 3
11
Uses the value set in [Pr.30] Deceleration time 3.
Содержание MELSEC iQ-R RD75P4
Страница 1: ...MELSEC iQ R Positioning Module User s Manual Application RD75P2 RD75P4 RD75D2 RD75D4 ...
Страница 2: ......
Страница 13: ...11 MEMO ...
Страница 19: ...17 CONTENTS INDEX 588 REVISIONS 592 WARRANTY 593 TRADEMARKS 594 ...
Страница 498: ...496 13 PROGRAMMING 13 2 List of Labels Used ...
Страница 503: ...13 PROGRAMMING 13 4 Program Example 501 13 ...
Страница 511: ...13 PROGRAMMING 13 4 Program Example 509 13 Torque change program Step operation program Skip program ...
Страница 512: ...510 13 PROGRAMMING 13 4 Program Example Teaching program Continuous operation interrupt program ...
Страница 513: ...13 PROGRAMMING 13 4 Program Example 511 13 Target position change program Absolute position restoration program ...
Страница 514: ...512 13 PROGRAMMING 13 4 Program Example Restart program Parameter data initialization program ...
Страница 515: ...13 PROGRAMMING 13 4 Program Example 513 13 Flash ROM write program Error reset program ...
Страница 516: ...514 13 PROGRAMMING 13 4 Program Example Stop program ...
Страница 565: ...APPENDICES Appendix 4 Operation Examples of When the Remote Head Module Is Mounted 563 A ...
Страница 568: ...566 APPENDICES Appendix 4 Operation Examples of When the Remote Head Module Is Mounted Common program ...
Страница 584: ...582 APPENDICES Appendix 4 Operation Examples of When the Remote Head Module Is Mounted Restart program ...
Страница 587: ...APPENDICES Appendix 4 Operation Examples of When the Remote Head Module Is Mounted 585 A Stop program ...
Страница 597: ......







































































