



























Operation of Teaching Box (R32TB)
Select a menu item
FR series
6 - 7
6.3
Select a menu item
There are two ways to call up a menu:
●
Select a menu by entering a number
●
Select the menu with the cursor an press the [EXE] key
Running
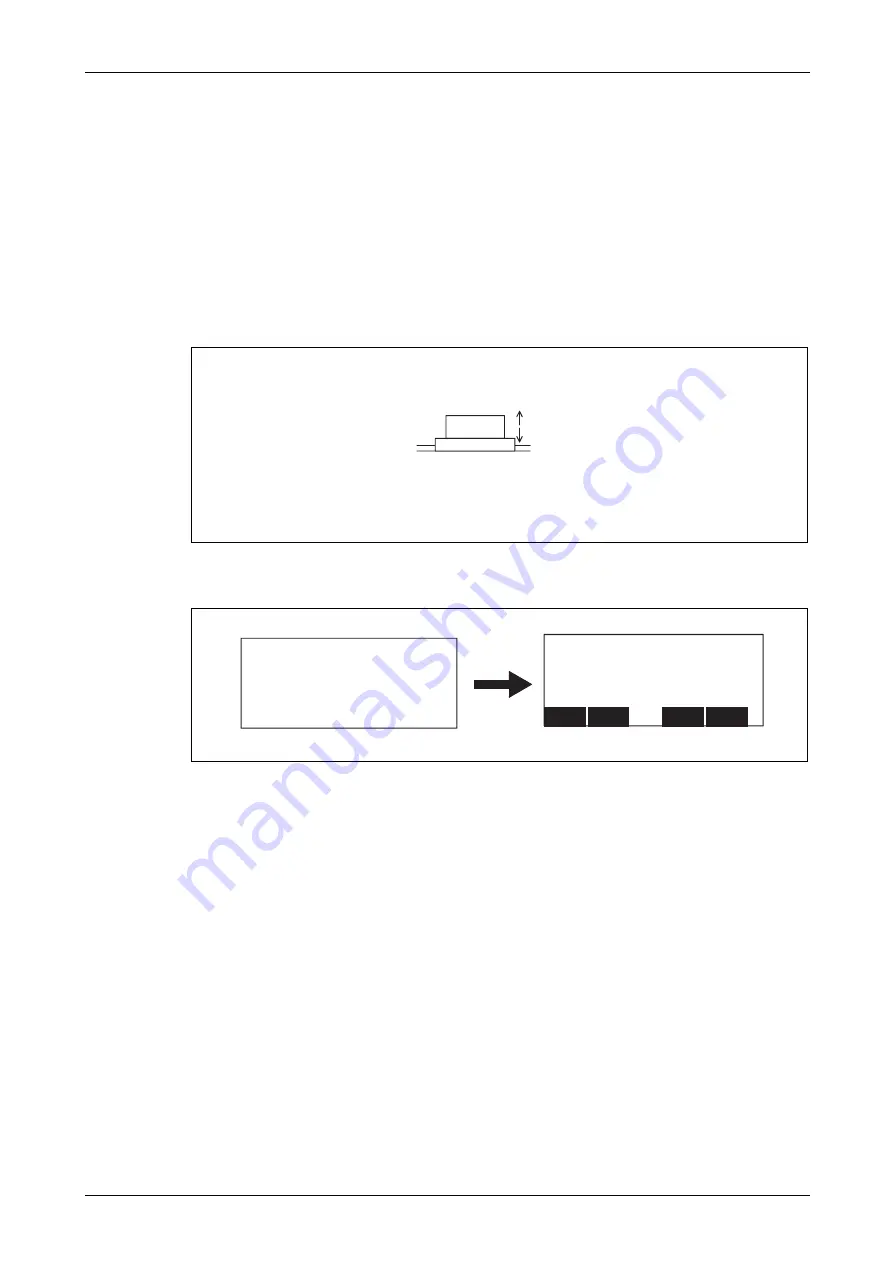
Both possibilities are displayed in the following example by selecting menu item "1. FILE/EDIT".
Set the [MODE] switch of the controller to "MANUAL". Activate the Teaching Box by setting the
[ENABLE/DISABLE] switch of the Teaching Box to "ENABLE".
The start screen appears after switching on. After the start screen appears, press [EXE] key to call
up the main men.
R002757E
R002759E
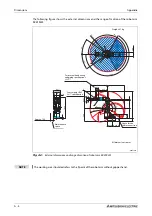
Top: disabled
Bottom: enabled (lights up)
Teaching Box
Rear of the
Teaching Box
MELFA CR800-D Ver. S3
RH-3FH5515-D
COPYRIGHT (C) 2011 MITSUBISHI ELEC
TRIC CORPORATION ALL RIGHTS RESE
RVED
<MENU>
1. FILE/EDIT 2. RUN
3. PARAM. 4. ORIGIN/BRK
5. SET/INIT. 6. ENHANCED
CLOSE
123
Содержание MELFA RH-FRH-D
Страница 2: ......
Страница 4: ......
Страница 6: ......
Страница 16: ...Contents X ...
Страница 22: ...Environmental conditions for operation Introduction 1 6 ...
Страница 70: ...Grounding the robot system Installation 3 32 ...
Страница 90: ...Teaching Box connection Connection 4 20 ...
Страница 96: ...Switch on the robot system Startup 5 6 ...
Страница 128: ...Dimensions Appendix A 18 ...
Страница 130: ...A 20 Index Appendix ...
Страница 131: ......
Страница 132: ......
Страница 133: ......
Страница 134: ......
Страница 135: ......
Страница 136: ......
Страница 137: ......
Страница 138: ......
Страница 139: ......
Страница 140: ......
Страница 141: ......
Страница 142: ......
Страница 143: ......
Страница 144: ......
Страница 145: ......
Страница 146: ......
Страница 147: ......
Страница 148: ......
Страница 149: ......
Страница 150: ......
Страница 151: ......
Страница 152: ......
Страница 153: ......
Страница 154: ......
Страница 155: ......
Страница 156: ......
Страница 157: ......
Страница 158: ......
Страница 159: ......
Страница 160: ......
Страница 161: ......
Страница 162: ......
Страница 163: ......
Страница 164: ......
Страница 165: ......