





























-48-
(2) Setting example
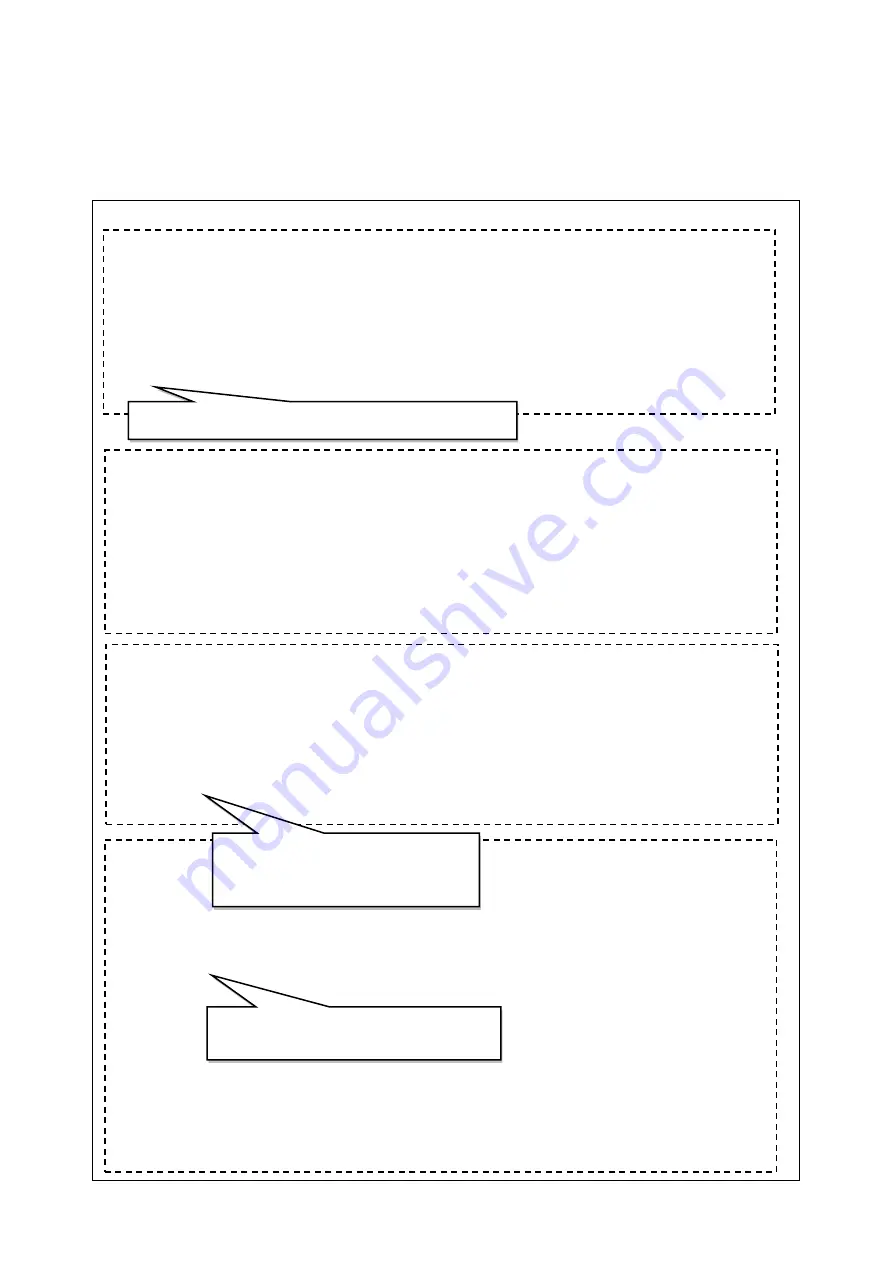
a) Setting in the program (set as status variable)
The following describes how to set the setting value to the program as status variable.
Condition numbers "-1" and "0" can be used.
'[Control mode (0)]
P_FsStf0 = (+0.00,+0.00,+0.00,+0.00,+0.00,+0.00)(0,0)
'Stiffness coefficient [N/mm]
P_FsDmp0 = (+0.00,+0.00,+0.00,+0.00,+0.00,+0.00)(0,0) 'Damping coefficient
P_FsMod0 = (+1.00,+1.00,+1.00,+0.00,+0.00,+0.00)(0,0) 'Force sense control mode (X, Y,
Z-axis, force control)
M_FsCod0 = 0
'Force sense control coordinate
system (tool)
'[Control characteristics (0)]
P_FsGn0 = (+3.00,+3.00,+3.00,+0.00,+0.00,+0.00)(0,0) 'Force control gain [µm/N]
P_FsFLm0 = (+0.00,+0.00,+0.00,+0.00,+0.00,+0.00)(0,0) 'Force detection setting value [N]
P_FsFCd0 = (+0.00,+0.00,+5.00,+0.00,+0.00,+0.00)(0,0) 'Force command (X, Y-axis: 0.0 [N],
Z-axis: 5.0 [N])
P_FsSpd0 = (+0.00,+0.00,+0.00,+0.00,+0.00,+0.00)(0,0) 'Set the speed of the speed control mode
P_FsSwF0 = (+0.00,+0.00,+0.00,+0.00,+0.00,+0.00)(0,0) 'Set the force/speed judgment value
'[Control characteristics (-1)]
P_FsGn1 = (+0.00,+0.00,+4.00,+0.00,+0.00,+0.00)(0,0) 'Force control gain [µm/N]
P_FsFLm1 = (+0.00,+0.00,+0.00,+0.00,+0.00,+0.00)(0,0) 'Force detection setting value [N]
P_FsFCd1 = (+0.00,+0.00,+12.00,+0.00,+0.00,+0.00)(0,0) 'Force command
P_FsSpd1 = (+0.00,+0.00,+0.00,+0.00,+0.00,+0.00)(0,0) 'Set the speed of the speed control mode
P_FsSwF1 = (+0.00,+0.00,+0.00,+0.00,+0.00,+0.00)(0,0) 'Set the force/speed judgment value
• • • • • •
Spd 10
Servo On
Mvs P1,-3
Dly 1
'Input Dly before the offset cancel (wait until the control completely stops)
Fsc On, 0, -1, 1 'Force sensor control enabled (control mode = 0, control characteristics =
-1, offset cancel enabled)
• • • • • • •
*Insert complete conditions are input (interrupt, IF condition statement, and others.)*
• • • • • • •
Fsc Off
'Disable the force sense control
End
Status variable name + condition
number (last number)
"1" is condition number "-1"
Status variable name + condition number (last number)
Operates with control mode "0", control
characteristics "-1" as set in the program
Содержание MELFA BFP-A3614
Страница 1: ...Mitsubishi Industrial Robot Robot Seminar Textbook Force Sensor Application BFP A3614 ...
Страница 2: ......
Страница 8: ... Revision History Print Date Instruction Manual No Revision content 2018 07 31 BFP A3614 First print ...
Страница 33: ... 22 b CR800 R controller CN1 connector CR800 R controller front To OPT1 connector CPU module SSCNET III cable ...
Страница 34: ... 23 2 F series a CR750 D controller ...
Страница 35: ... 24 b CR751 D controller ...
Страница 36: ... 25 c CR750 Q CR751 Q controller CPU module ...
Страница 75: ... 64 MEMO Please use this page for your memo ...
Страница 95: ... 84 MEMO Please use this page for your memo ...
Страница 103: ... 92 MEMO Please use this page for your memo ...
Страница 111: ... 100 MEMO Please use this page for your memo ...
Страница 119: ... 108 MEMO Please use this page for your memo ...
Страница 123: ... 112 MEMO Please use this page for your memo ...
Страница 129: ... 118 MEMO Please use this page for your memo ...
Страница 133: ... 122 MEMO Please use this page for your memo ...
Страница 137: ... 126 MEMO Please use this page for your memo ...
Страница 143: ... 132 MEMO Please use this page for your memo ...
Страница 149: ... 138 MEMO Please use this page for your memo ...
Страница 153: ... 142 MEMO Please use this page for your memo ...
Страница 159: ... 148 MEMO Please use this page for your memo ...
Страница 171: ... 160 MEMO Please use this page for your memo ...
Страница 183: ... 172 MEMO Please use this page for your memo ...
Страница 191: ... 180 MEMO Please use this page for your memo ...
Страница 211: ......




























































