





























Speed control under Real sensorless vector control, vector control, PM sensorless vector
control
166
3) Press
or
to calculate the continuous load inertia ratio, or calculate the gain.
(The operation command during External operation is the STF or STR signal.)
Execution procedure for easy gain tuning (Pr.819 = "2" Load inertia ratio
manual input)
Easy gain tuning (load inertia ratio manual input) is valid in the speed control mode under Real sensorless vector control, the
speed control and position control modes under vector control, and the speed control mode under PM sensorless vector
control.
1) Set the load inertia ratio for the motor in
Pr.880 Load inertia ratio
.
2) Set "2" (easy gain tuning enabled) in
Pr.819 Easy gain tuning selection
. When set,
Pr.820 Speed control P gain 1
and
Pr.821 Speed control integral time 1
are set automatically.
Operation is performed with the adjusted gain from the next operation.
3) Perform a test run, and set the response level in
Pr.818 Easy gain tuning response level setting
. Setting this
parameter higher improves the trackability for commands, but setting it too high causes vibration. (The response level
can be adjusted during operation when
Pr.77 Parameter write selection
="2" (parameters can be written during
operation).)
NOTE
• When
Pr.819
="1, 2" is set, even if the
Pr.819
setting value is returned to "0" after tuning is performed, the data that was set in
each parameter is retained in the tuning results.
• If good precision cannot be obtained even after executing easy gain tuning, because of external disturbances or other
reasons, perform fine adjustment manually. At this time, set the setting value of
Pr.819
to "0" (no easy gain tuning).
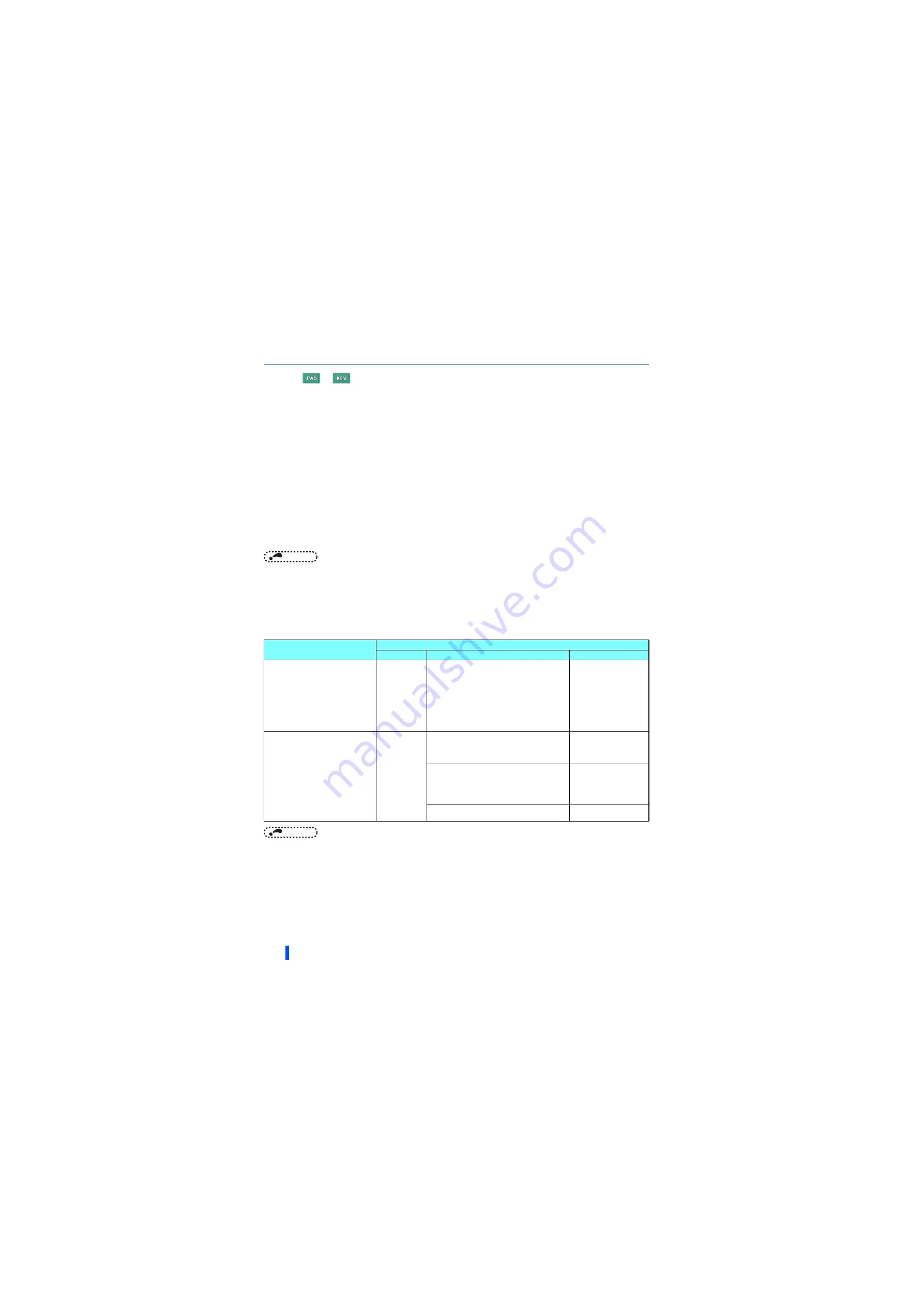
Parameters set automatically by easy gain tuning
The following table shows the relationship between the easy gain tuning function and gain adjustment parameters.
NOTE
• If easy gain tuning is executed at an inertia equal to or higher than the specified value under vector control, a fault such as
hunting may occur. Also, if the motor shaft is fixed by the servo lock or position control, the bearing may be damaged. In this
case, do not perform easy gain tuning. Adjust the gain manually.
• The load inertia ratio is only calculated under vector control.
Easy gain tuning selection (Pr.819) setting
0
1
2
Pr.880 Load inertia ratio
Manual input
a) The inertia calculation result (RAM) using easy
gain tuning is displayed.
b) The parameter is set at the following times.
Every hour after turning ON the power
When
Pr.819
is set to a value other than "1"
After changing to a control other than vector
control (such as V/F control) using
Pr.800
c) Write (manual input) is available only during a
stop.
Manual input
Pr.820 Speed control P gain 1
Pr.821 Speed control integral time 1
Pr.828 Model speed control gain
Pr.422 Position control gain
Pr.446 Model position control gain
Manual input
a) The tuning result (RAM) is displayed.
a) Gain is calculated when
Pr.819
is set to "2", and
the result is set in the
parameter.
b) The parameter is set at the following times.
Every hour after turning ON the power
When
Pr.819
is set to a value other than "1"
After changing to a control other than vector
control (such as V/F control) using
Pr.800
b) When read, the tuning
result (parameter setting
value) is displayed.
c) Write (manual input) is not available
c) Write (manual input) is
not available
Содержание 800 Series
Страница 11: ...MEMO 10 ...
Страница 17: ...MEMO 16 ...
Страница 95: ...MEMO 94 ...
Страница 671: ...MEMO 670 ...
Страница 681: ...MEMO 680 ...