





























21-560
21-560
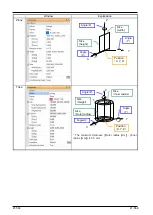
Figure 21-82 Show / hide project / mech. name
21.9.2. User mech. type and relationship to robot
User mech. type
Set mech. to assign the joint axis value of the user mechanism.
Additional axis
:
Mech. with mech. number 1 (robot)
User mech.-1
:
Mech. with mech. number 2
User mech.-2
)
:
Mech. with mech. number 3
Figure 21-83 User mech. type
For details on setting of multi-mech. and additional axis, please refer to "
Relationship to robot
Set the relationship between the user mech. and the robot.
Independence
:
Make it a mechanism separate from the robot at a position distant from the
robot
(Coordinates are relative to the robot coordinates)
Attach to the robot's
mechanical interface
:
Attach to the mechanical interface of robot and make it part of robot
(The coordinates are relative coordinates from the mechanical interface)
Содержание 3F-14C-WINE
Страница 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Страница 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Страница 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Страница 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Страница 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Страница 624: ...24 624 24 624 Figure 24 4 Document output example ...






































































