





























User Switches C1 Submenu
96
AUTO STOP
(Auto Stop Function Enable)
The Auto Stop function determines how the
drive logic will respond to a zero or non-zero
speed command. The function will work with a
Multistep/Serial/Analog Speed Command.
When Speed Command SRC (C1) is set to
Analog, the Auto Stop function can only be
used if Speed Zero Bnd (A1) is set to a value
greater than 0.
Disabled: When the Auto Stop function is
disabled, the magnitude of the speed
command plays no part in the logical starting
or stopping of the drive.
Enabled: When the Auto Stop function is
enabled, the following changes occurs to the
start and stop sequence:
Both a Run command and a non-zero
speed command are required to start the
drive
Either the removal of the Run command or
the setting the speed command to zero will
initiate a stop. When using an Analog
Speed Command, the drive will consider
the speed command to be zero when it is
below the Speed Zero Bnd (A1) threshold.
Remember, when the auto stop function is
enabled (AUTO STOP (C1)=enabled) both a
non-zero speed command AND the run
command are required to start the drive. It
makes no difference which signal is enabled
first; the drive does not start until both are
present. When initiating a stop, which signal
is removed first does make a difference.
SPEED REG TYPE
i,ii
(Speed Regulator Type)
This switch toggles between the Elevator
Speed Regulator (Ereg) and the PI Speed
Regulator. Magnetek recommends the use of
the Elevator Speed Regulator for better
elevator performance. If this parameter is set
to external regulator, the drive will be
configured as a torque controller.
The source of the external torque command is
determined by the EXT TORQ CMD SRC (C1)
parameter. The HPV 900 Series 2 has the
following three closed loop speed regulation
options and an option for turning off the
internal speed regulator:
Elevator Speed Regulator (Ereg)
PI Speed Regulator
External Speed Regulator
i
Parameter accessible through
CLOSED LOOP (U9)
ii
Parameter accessibly through
PM (U9)
The Elevator Speed Regulator is
recommended for use with elevator
applications but is not required. The regulator
type can be changed by using the SPEED
REG TYPE (C1) parameter.
Elevator Speed Regulator (Ereg)
The use of the Elevator Speed Regulator
allows the overall closed loop response
between speed reference and speed to be
ideal for elevator applications. The desirable
features of the Elevator Speed Regulator are:
no overshoot at the end of accel period
no overshoot at the end of decel period
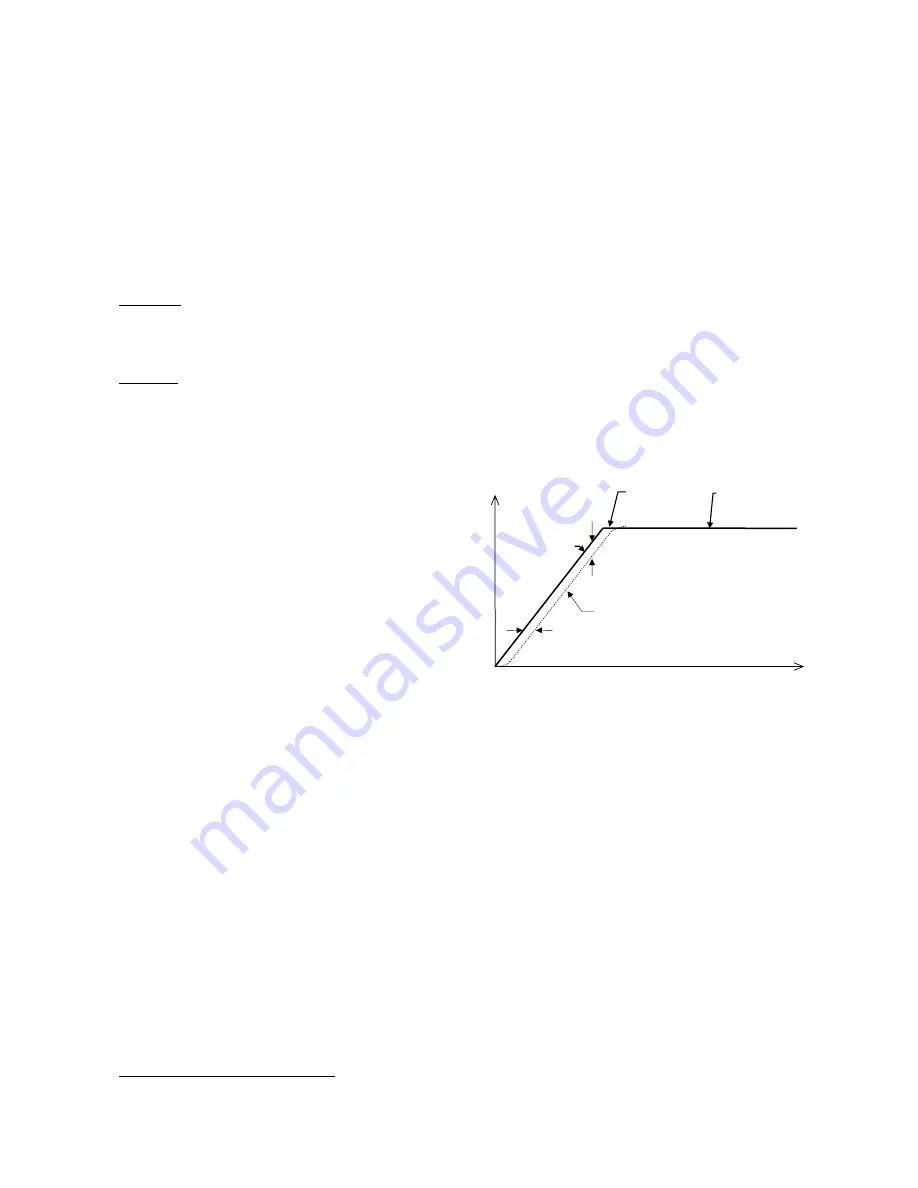
One characteristic of the Elevator Speed
Regulator is that during the accel / decel
period the speed feedback does not match the
speed reference creating a speed error or
tracking delay. As an example, the Elevator
Speed Regulator’s speed response is shown
for a ramped speed reference below.
Ereg Example
The Elevator Speed Regulator is tuned by:
System Inertia parameter (INERTIA(A1)),
which is easy to obtain by using the drive
software to estimate the system inertia.
Response parameter (RESPONSE(A1)),
which is the overall regulator bandwidth in
radians per sec. This parameter defines
the responsiveness of the speed regulator.
The tracking delay shown is defined as
(1/RESPONSE) seconds. The tracking delay
is not affected by the gain reduce multiplier.
iii
Parameter accessible through
OPEN LOOP(U9)
speed
feedback
speed error
tracking delay
speed
reference
commanded
speed
no
overshoot
time
speed
Содержание HPV 900 Series 2
Страница 4: ......
Страница 195: ...APPENDIX Dimensions Mounting Holes Weights 173 Figure 46 Frame 2 Dimensions Mounting Holes and Weight...
Страница 196: ...APPENDIX Dimensions Mounting Holes Weights 174 Figure 47 Frame 3 Dimensions Mounting Holes and Weight...
Страница 197: ...APPENDIX Dimensions Mounting Holes Weights 175 Figure 48 Frame 3 5 Dimensions Mounting Holes and Weight...
Страница 198: ...APPENDIX Dimensions Mounting Holes Weights 176 Figure 49 Frame 4 Dimensions Mounting Holes and Weight...
Страница 199: ...APPENDIX Dimensions Mounting Holes Weights 177 Figure 50 Frame 5 Dimensions Mounting Holes and Weight...
Страница 227: ...205 Z Z MARKER LOST 150 Zero Speed Level parameter 47 Zero Speed logic output 105 Zero Speed Time parameter 47...
Страница 228: ......
Страница 229: ......







































































