





























7. Tuning
7-6
7.3
Manual Gain Tuning
7.3.1
Gain Tuning Sequence
For a cascade-type controller, tune the gain of the velocity controller located at an inner position first,
then tune the gain of the position controller located at an outer position.
In other words, perform tuning in the order of proportional gain
integral gain
feedforward gain.
The role of each individual gain is as follows.
-
Proportional gain: Determines controller BW
-
Integral gain: Determines error of the steady state and generates an overshoot
-
Feedforward gain: Enhances on the system lag characteristic
-
Differential gain: Plays the role of a damper for the system (not provided)
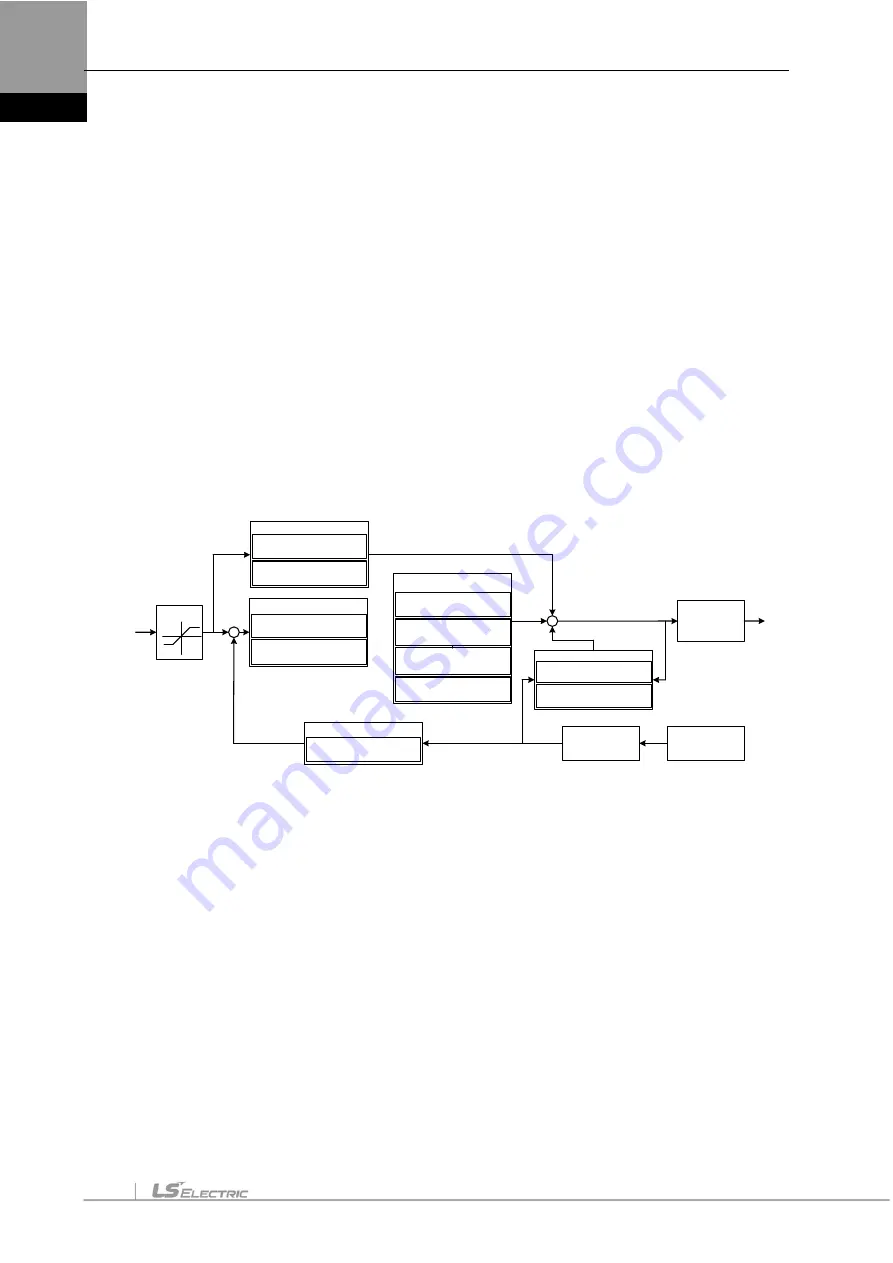
Velocity Controller Tuning
Limit
Speed Loop
Gain1[0x2102]
Velocity Control
Speed Loop IntegralTime
[0x2103]
Torque Feed-forward
Gain[0x210E]
Torque Feed-Forward
Torque Feed-forward
Filter[0x210F]
P/PI Control
Conversion[0x2114]
P/PI Conversion
P Control Switch
Torque[0x2115]
P Control Switch
Speed[0x2116]
P control Switch
Following Error[0x2118]
Disturbance Observer
Gain[0x2512]
Disturbance Observer
Disturbance Observer
Filter[0x2513]
Current
Control
Loop
Velocity
calculation
Encoder
Speed Feedback filter
Time[0x210B]
Filter
+
-
+
+
+
(1) Inertia ratio setting
-
Use the automatic inertia estimation function or carry out manual setting
(2) Proportional gain setting
-
Monitor for torque and noise before any vibration occurs
Содержание L7NHF Series
Страница 2: ......
Страница 14: ...Table of Contents xii ...
Страница 60: ...2 Wiring and Connection 2 38 ...
Страница 158: ...6 Safety Functions 6 6 ...
Страница 172: ...7 Tuning 7 14 ...
Страница 182: ...8 Procedure Function 8 10 ...
Страница 192: ...9 Full Closed Control 9 10 ...
Страница 214: ...10 Object Dictionary 10 22 ...
Страница 363: ...11 Product Specifications 11 43 ...
Страница 364: ......







































































