





























Gocator Line Profile Sensors - User Manual
Gocator Web Interface • Measurement • 168
Parameter
Description
Decision
Region
Filters
Parameters
Bridge Value
The Bridge Value tool lets you calculate the "bridge value" and angle of a scanned surface. A bridge
value is a single, processed range that is basically a filtered average of a laser line profile, representing a
"roughness calculation." A bridge value is typically used to measure road roughness.
The Bridge value tool is
only
available when
Uniform Spacing
(in the
Scan Mode
panel on the
Scan
page) is unchecked, as the tool only works with unresampled data. For more information,
see
Uniform Spacing (Data Resampling)
This measurement is only available on Gocator 2342 sensors.
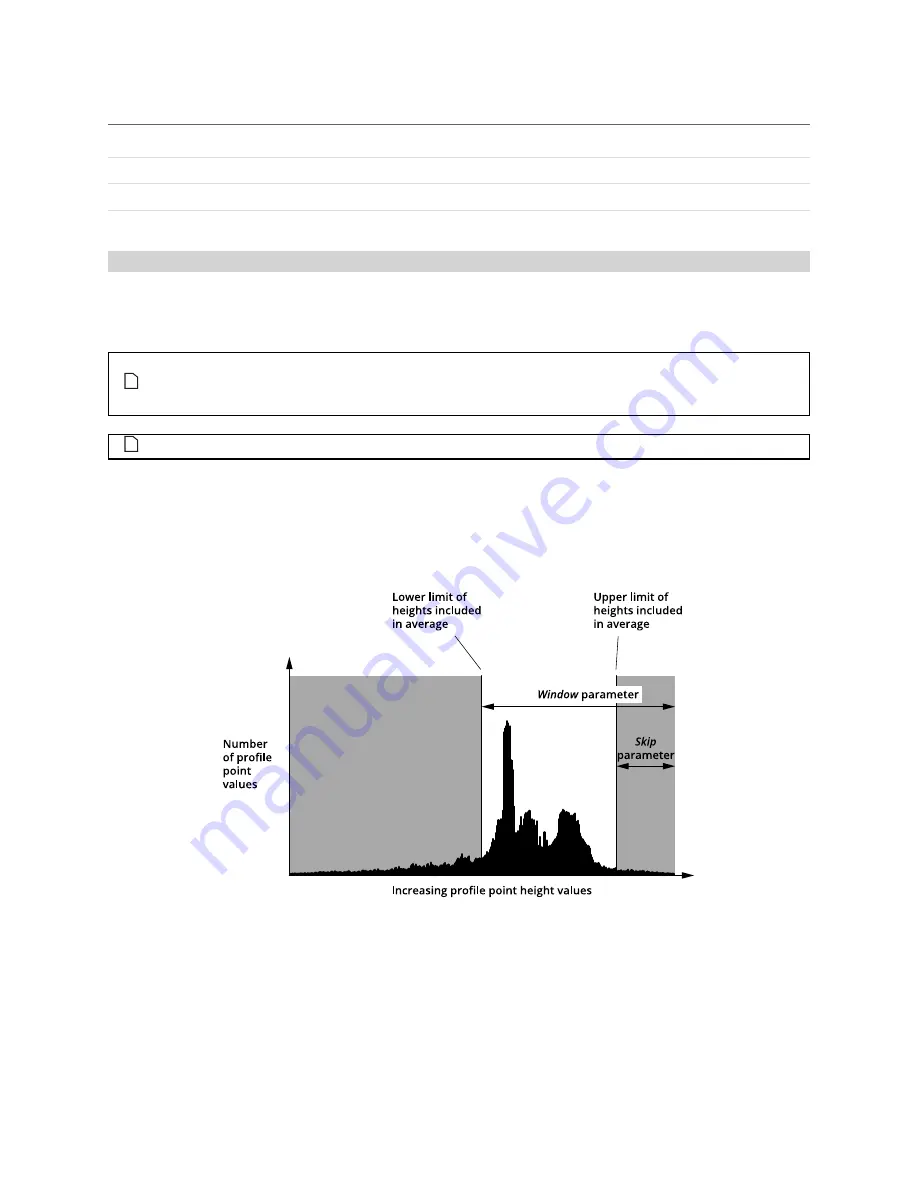
The Bridge Value tool measurements use a histogram of the ranges that make up the profile, in which
the ranges are ordered from lowest to highest. The
Window
and
Skip
parameters together determine
what segment of the heights in the histogram is used to calculate the bridge value. The following
diagram illustrates what points of the histogram would be included for calculating the bridge value
where
Window
is roughly 50% and
Skip
is roughly 15% of the histogram.
Profile point heights in the white area are included in the calculation of the average. Profile point heights
in the grey area are excluded. By adjusting the
Window
and
Skip
parameters, you can choose profile
point heights to remove unwanted features. In road roughness applications, you could exclude road
features, such as rocks, cracks, tining valleys, and so on, to get an accurate representation of the tire-to-
road interface. For more information on parameters, see the
Parameters
table below.
Gocator compares the measurement value with the values in
Min
and
Max
to yield a decision. For more
information on decisions, see
Содержание Gocator 2100 Series
Страница 10: ...Gocator Line Profile Sensors User Manual 10 Return Policy 515 Software Licenses 516 Support 522 Contact 523 ...
Страница 193: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 193 2D View 3D View Measurement Panel ...
Страница 197: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 197 ...
Страница 209: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 209 2D View 3D View ...
Страница 214: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 214 2D View 3D View ...
Страница 215: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 215 ...
Страница 225: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 225 2D View 3D View ...
Страница 462: ...Gocator Line Profile Sensors User Manual Specifications Sensors 462 Dimensions Envelope ...
Страница 464: ...Gocator Line Profile Sensors User Manual Specifications Sensors 464 Envelope ...
Страница 466: ...Gocator Line Profile Sensors User Manual Specifications Sensors 466 Dimensions Envelope ...
Страница 468: ...Gocator Line Profile Sensors User Manual Specifications Sensors 468 Dimensions Envelope ...
Страница 470: ...Gocator Line Profile Sensors User Manual Specifications Sensors 470 Dimensions ...
Страница 471: ...Gocator Line Profile Sensors User Manual Specifications Sensors 471 Envelope ...
Страница 473: ...Gocator Line Profile Sensors User Manual Specifications Sensors 473 Dimensions ...
Страница 474: ...Gocator Line Profile Sensors User Manual Specifications Sensors 474 Envelope ...
Страница 476: ...Gocator Line Profile Sensors User Manual Specifications Sensors 476 Dimensions ...
Страница 477: ...Gocator Line Profile Sensors User Manual Specifications Sensors 477 Envelope ...
Страница 479: ...Gocator Line Profile Sensors User Manual Specifications Sensors 479 Dimensions ...
Страница 480: ...Gocator Line Profile Sensors User Manual Specifications Sensors 480 Envelope ...
Страница 484: ...Gocator Line Profile Sensors User Manual Specifications Sensors 484 Dimensions ...
Страница 485: ...Gocator Line Profile Sensors User Manual Specifications Sensors 485 Envelope ...
Страница 487: ...Gocator Line Profile Sensors User Manual Specifications Sensors 487 Dimensions ...
Страница 488: ...Gocator Line Profile Sensors User Manual Specifications Sensors 488 Envelope ...
Страница 491: ...Gocator Line Profile Sensors User Manual Specifications Sensors 491 Dimensions ...
Страница 492: ...Gocator Line Profile Sensors User Manual Specifications Sensors 492 Envelope ...
Страница 506: ...Gocator Line Profile Sensors User Manual Specifications Master Hubs 506 Master 810 Dimensions ...
Страница 512: ...Gocator Line Profile Sensors User Manual Specifications Master Hubs 512 Master 2410 Dimensions ...





















































