





























RD4 CANopen®
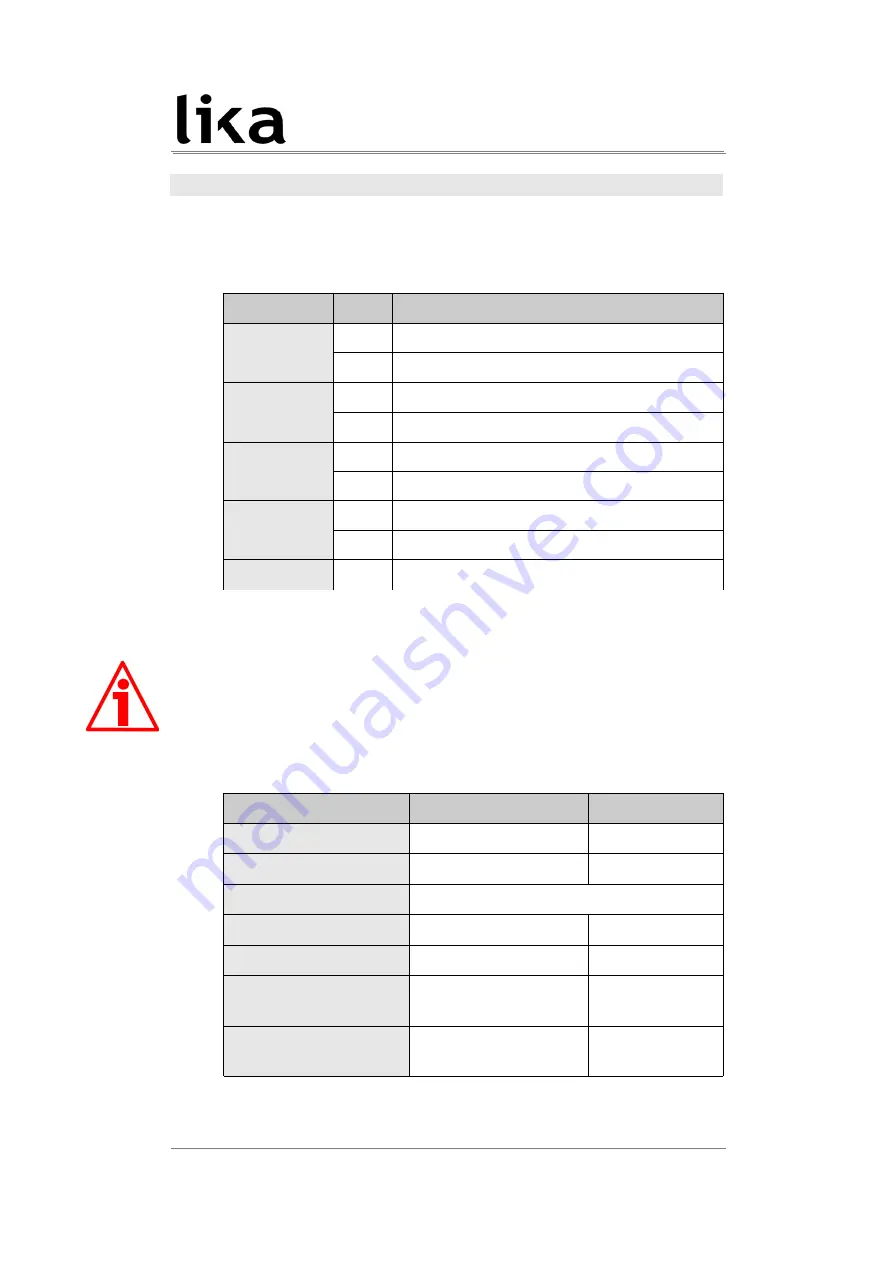
1400 Receive PDO Communication Parameter 1
This object contains the communication parameters for the PDOs the device is
able to receive (Receive PDOs).
01
COB-ID
of PDO1 [Unsigned32, rw]
Bit number
Value Meaning
31 (MSB)
0
PDO exists / is valid
1
PDO does not exist / is not valid
30
0
RTR allowed on this PDO
(not implemented)
1
no RTR allowed on this PDO
29
0
11-bit ID (CAN 2.0A)
1
29-bit ID (CAN 2.0B)
28 … 11
0
if bit 29 = 0
X
if bit 29 = 1: bits 28-11 of 29-bit-COB-ID
10 … 0 (LSB)
X
bits 10-0 of COB-ID
Default = 4000 0200h+Node ID (no RTR, COB-ID)
WARNING
It is mandatory to set the bit 30 of COB-ID to 1 (value 0 is not allowed).
This means that “No RTR is allowed on the PDO”.
At power on, this object always contains the default value.
02
Transmission Type
[Unsigned8, rw]
Transmission type
PDO transmission
00h (0)
Acyclic, synchronous
not implemented
01h … F0h (1 … 240)
Cyclic, synchronous
implemented
F1h … FBh (241 … 251)
not implemented - reserved
FCh (252)
Synchronous, RTR only
not implemented
FDh (253)
Asynchronous, RTR only
not implemented
FEh (254)
Asynchronous,
manufacturer specific
implemented
FFh (255)
Asynchronous, device
profile specific
not implemented
Default = FEh (event-driven, asynchronous, manufacturer specific)
MAN RD4 CB E 1.5
Programming parameters
50 of 72
Содержание RD4
Страница 1: ...User s guide RD4 Position measurement control ...
Страница 71: ...This page intentionally left blank ...





















































