





























12.2
Second feedback system for the techology application
The parameter settings for the feedback system of the application are accessed in »EASY
starter« via the following path:
•
Settings tab
•
Basic setting \ Feedback application (B)
Here, you have the choice of using the following feedback systems:
•
Resolver
•
Encoder
You can select the feedback system that you wish to use by pressing the correspondingly
named button.
12.2.1
General settings
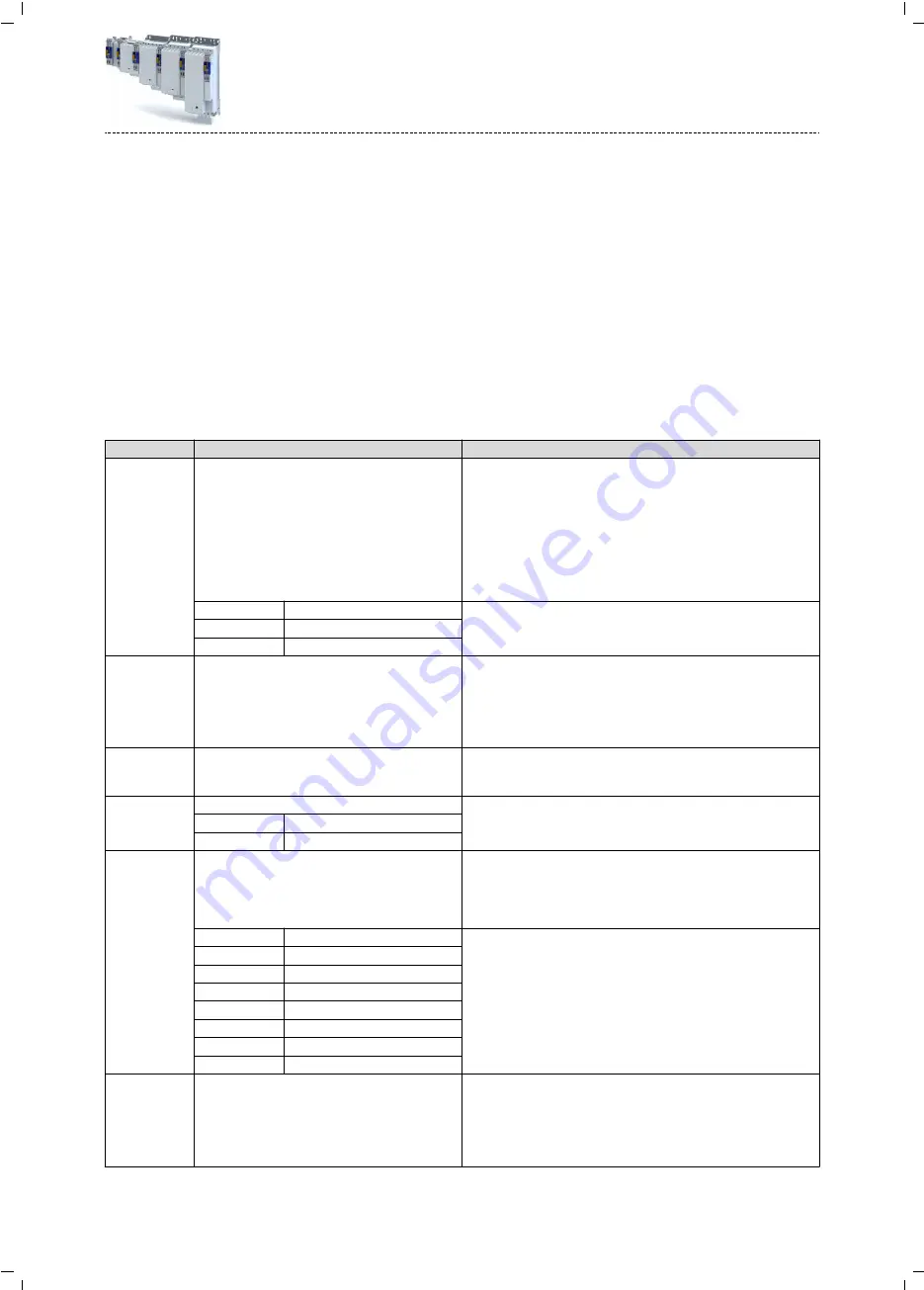
This chapter provides information on general feedback system settings for the application.
Parameter
Address
Name / setting range / [default setting]
Info
0x2C55
Load encoder/master encoder error response
Via this parameter, the error response to an encoder error of application
feedback B (slot B) is set.
Selection of the response to the triggering of the encoder signal loss
monitoring.
Only active when used as:
•
Feedback system for motor control if set,
•
Signal source for the "position counter" function.
Associated error code:
•
29444 | 0x7304 - RANLI_CIMES_1000_20910
0 No response
1 Fault > CiA402
2 Warning
0x2C56
Number of the absolute ascertainable revolutions of
load encoder/master encoder
•
Read only
Is set by the firmware according to the available version:
•
0: no absolute value encoder (sin/cos encoder) or resolver with num-
ber of pole pairs > 1
•
1: Hiperface encoder SingleTurn or resolver with number of pole
pairs = 1
•
> 1: Hiperface encoder Multi Turn
0x2C57
Open circuit detection sensitivity of load encoder/
master encoder
1 ... [100] ... 100 %
The sensitivity can be reduced by percentage, e. g. in case of EMC inter-
ferences.
0x2E00:041
Set position for load encoder
0 Off
1 On
0x60E6:001
Additional position encoder resolution - encoder
increments: Load encoder/master encoder - number
of increments
•
Setting can only be changed if the inverter is inhibi-
ted.
Setting the number of bits to be used for resolving a mechanical revolu-
tion of the secondary feedback system.
65536 16 Bit
262144 18 Bit
1048576 20 Bit
4194304 22 Bit
16777216 24 Bit
67108864 26 Bit
268435456 28 Bit
1073741824 30 Bit
0x60EB:001
Additional position encoder resolution - motor revolu-
tions: Load encoder/master encoder - resolution of
motor revolutions
1 ... [1] ... 1
•
Setting can only be changed if the inverter is inhibi-
ted.
Setting of the number of revolutions of the secondary feedback system.
Only setting "1" is accepted.
Configuring the feedback system
Second feedback system for the techology application
General settings
213
Содержание i950 Series
Страница 1: ...Inverters i950 servo inverters Commissioning EN ...
Страница 2: ......
Страница 312: ...15 Configure engineering port The given path leads you to the engineering port Configure engineering port 312 ...
Страница 397: ...19 Safety functions Supported safety functions for Basic Safety STO 4Safe Torque Off STO 398 Safety functions 397 ...
Страница 497: ......
Страница 498: ......
Страница 499: ......