





























Palletizing Solution - Instruction Manual
4. Operation
4.1. Starting Up
After the mechanical and electrical installation, follow these steps:
1. Make sure you have installed the URCaps. Please refer to the Installing URCap Package section
2. Configure the TCP. Use the proper values depending on if you use the extra reach bracket or not.
3. Open the Gripper Toolbar (top right of your screen). To make sure that the Toolbar is always displayed, tap Installation
→
URCaps
→
Vacuum and tick the Show Vacuum Toolbar checkbox.
4. Select the digital input for the box sensor.
5. Test the box sensor and the digital input : Tap the I/O tab and place an object in front of the box sensor to validate if the sig-
nal changes.
6. Test the Vacuum Gripper: Tap Installation
→
URCaps
→
Vacuum
→
Scan. Then, test the grip and release functions of the
Vacuum in the Gripper Toolbar.
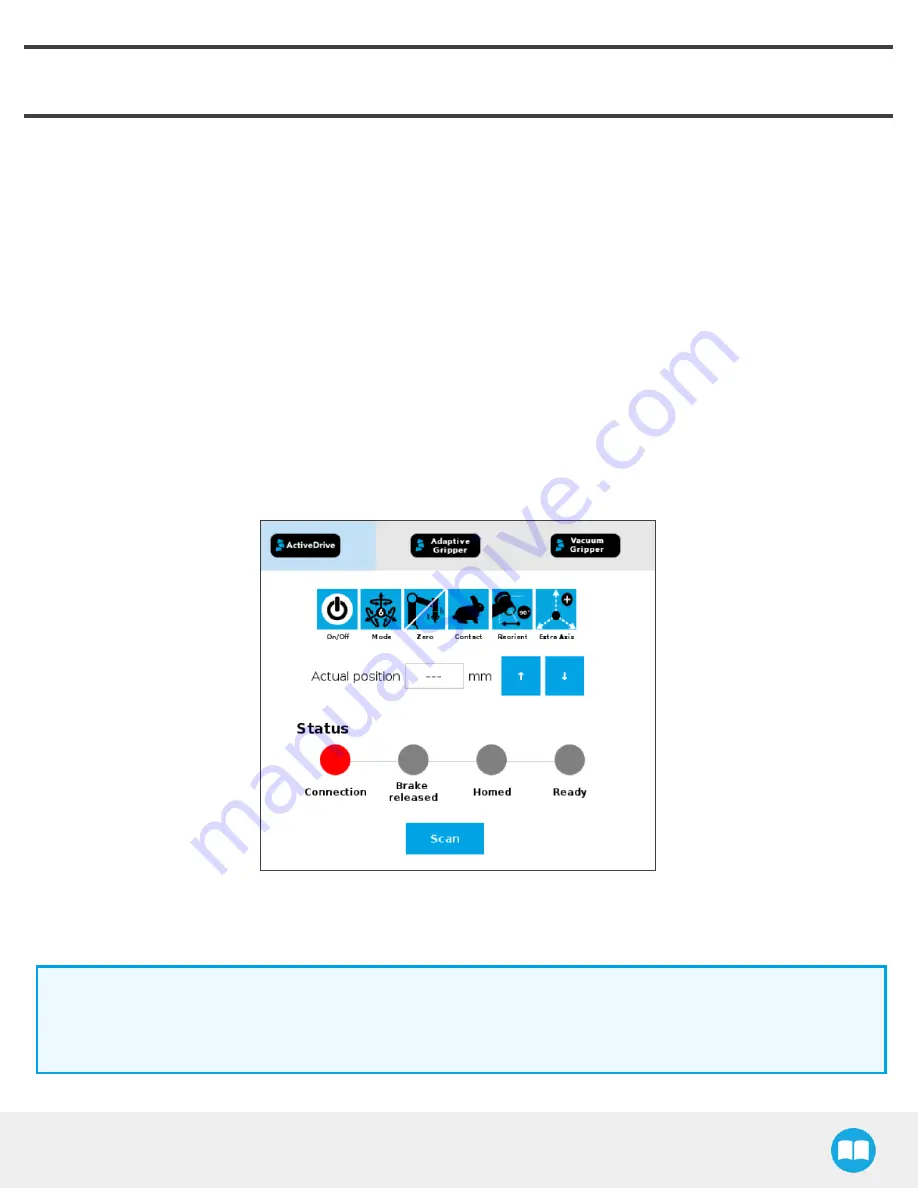
7. Activate and test the linear axis: Tap the UR+ icon
→
ActiveDrive toolbar
→
Extra Axis
→
Scan (you may have to press the
Start button). Use the arrows to test the linear axis action.
Fig. 4-1: Scan for the linear axis in the ActiveDrive toolbar
4.2. Light States
Light States Legend
l
Blink fast: 2 Hz (0.25s ON, 0.25s OFF)
l
Blink slow: 0.5 Hz (1s ON, 1s OFF)
64
Содержание ROBOTIQ AX Series
Страница 4: ...Palletizing Solution Instruction Manual 4...
Страница 14: ...Palletizing Solution Instruction Manual 14...
Страница 21: ...Palletizing Solution Instruction Manual 21...
Страница 82: ...6 1 2 AirPick Vacuum Gripper Fig 6 1 AirPick general dimensions 82...
Страница 83: ...Palletizing Solution Instruction Manual 6 1 3 Extra Reach Bracket 83...
Страница 84: ...6 1 4 Bracket for Two 2 Suction Cups Fig 6 2 Two air nodes bracket s dimensions 84...
Страница 110: ...1 2 2 Safety Connections Fig 12 2 Universal Robots Controller Safety Connections Schema 110...