





























User Manual Of EL7-EC** AC Servo
229
compensation value
Range
-100~100
Unit
%
Default
0
Index
2608h
Activation
Immediate
Pr6.09
Name
Negative direction torque
compensation value
Mode
F
Range
-100~100
Unit
%
Default
0
Index
2609h
Activation
Immediate
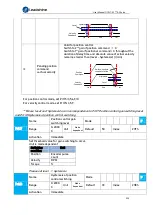
To reduce the effect of mechanical friction in the movement(s) of the axis. Compensation values
can be set according to needs for both rotational directions.
Applications:
1. When motor is at constant speed, d04 will deliver torque values.
Torque value in positive direction = T1;
Torque value in negative direction = T2
Pr6.08/Pr6.09 = T
f
=
6.9 Parameters adjustment under different control modes
Under different control mode, parameters adjustment has to be adjusted in this order:
“Inertia measuring” -> “Auto gain adjustment”->” Manual gain adjustments”
6.9.1 Position control mode
Set load-inertia ratio Pr0.04 after inertia determination.
No.
Parameter
Label
1
Pr1.00
1
st
position loop gain
2
Pr1.01
1
st
velocity loop gain
3
Pr1.02
1
st
velocity integral time constant
4
Pr1.03
1
st
velocity detection filter
5
Pr1.04
1
st
torque filter time constant
6
Pr1.05
2
nd
position loop gain
7
Pr1.06
2
nd
velocity loop gain
8
Pr1.07
2
nd
velocity integral time constant
9
Pr1.08
2
nd
velocity detection filter
10
Pr1.09
2
nd
torque filter time constant
11
Pr1.10
Velocity feedforward gain constant
12
Pr1.11
Velocity feedforward filter time constant







































































