























10
Upper Case
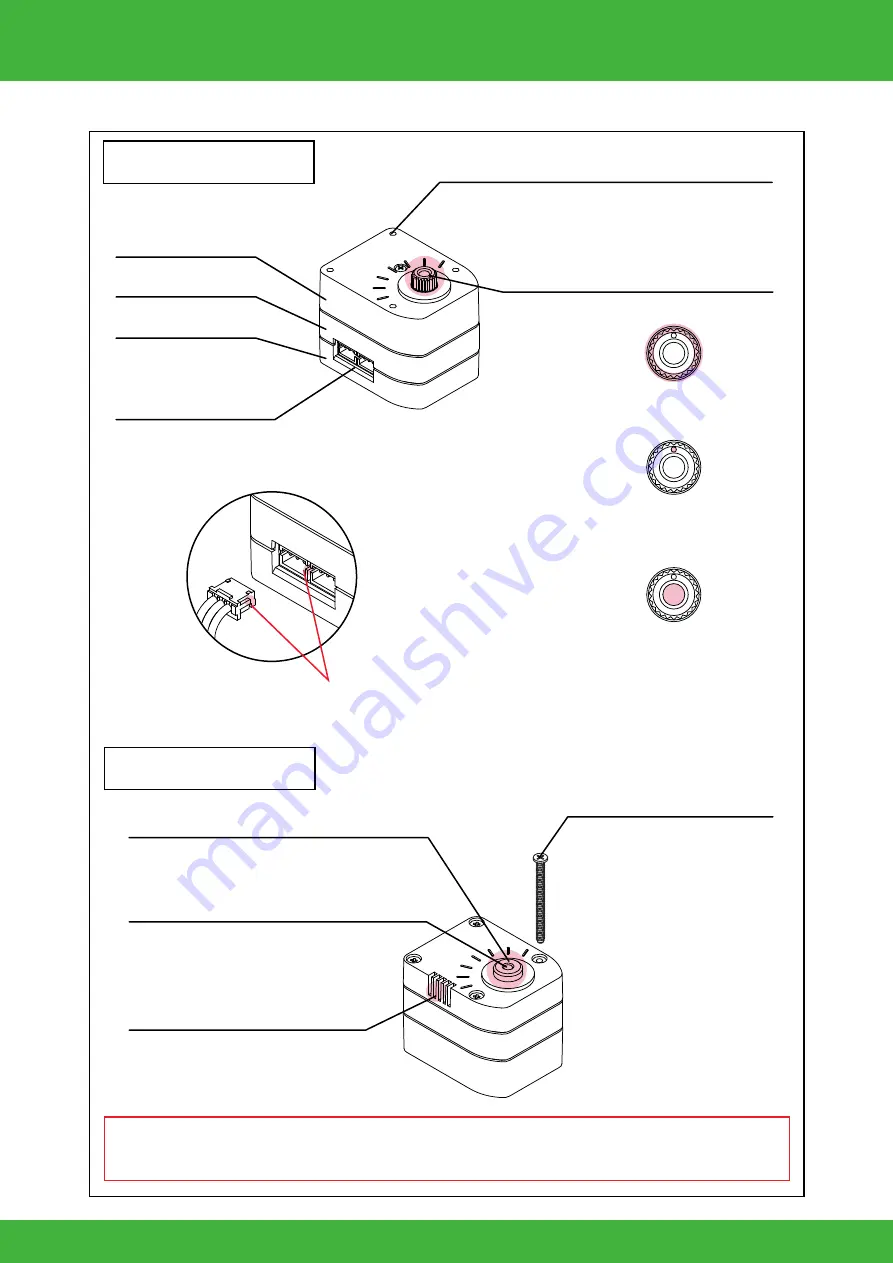
Upper Axis (Final Axis)
Case Screw
Frame part installation hole
Groove surrounding the shaft.
The top of the shaft has a concave
origin; find this position and install
the part.
This kit uses M3 screws.
This kit uses 2.6 - 4 screws.
The light comes on
when the power is on.
KRS-3301 ICS : Red
KRS-3304 ICS : Blue
This kit uses M2 screws.
Serration
Middle Case
Bottom Case
ZH connector
Whichever it is connected to,
there is no impact on operations.
Part Name of Servo Motor (KRS-3300 Series)
Origin
M3 Screw Hole
2.6 Tapping Screw Hole
LED
Align the protruding position and firmly insert all the way in.
Be careful not to push it in backward.
Frame parts are labeled Upper Side and Bottom Side to indicate
the installation direction.
Bottom Axis (Free Axis)
Bottom Side
Upper Side
Prior to Assembly
Servo Motor
Содержание KXR-R4LL
Страница 28: ...28 Body Assembly 2 Joining Body Attach all four areas 200mm x4 KXR R4LL...
Страница 31: ...31 Attach the cable 120mm 120mm Wheel Leg Assemble 4 sets Wheel leg KXR R4LL...
Страница 37: ...37 Complete Assembly completed The following will explain how to mount the battery and run motions KXR R4LL...
Страница 60: ......







































































