





























AKD PDMM User Guide | 10.2 Enable/Disable
10.2 Enable/Disable
10.2.1 Enable Modes
The AKD PDMM offers several options for hardware and software enables, as well as safe torque off
(STO) to cover a variety of conditions.
Hardware Enable Mode
The AKD PDMM has two methods hardware enable methods. These methods are controlled by
DRV.HWENMODE. Mode 0 allows for the drive to enable and clear faults on the rising edge of the hard-
ware enable input. Mode 1 will NOT clear any faults on the rising edge of the hardware enable input, allow-
ing you to review any current faults and manually clearing.
Software Enable Default
In addition, the Software Enable has two methods for enabling the AKD PDMM. These are controlled by
DRV.ENDEFAULT. Default 0 leaves the software in the disabled state upon start-up. Default 1 enables
the software upon start-up.
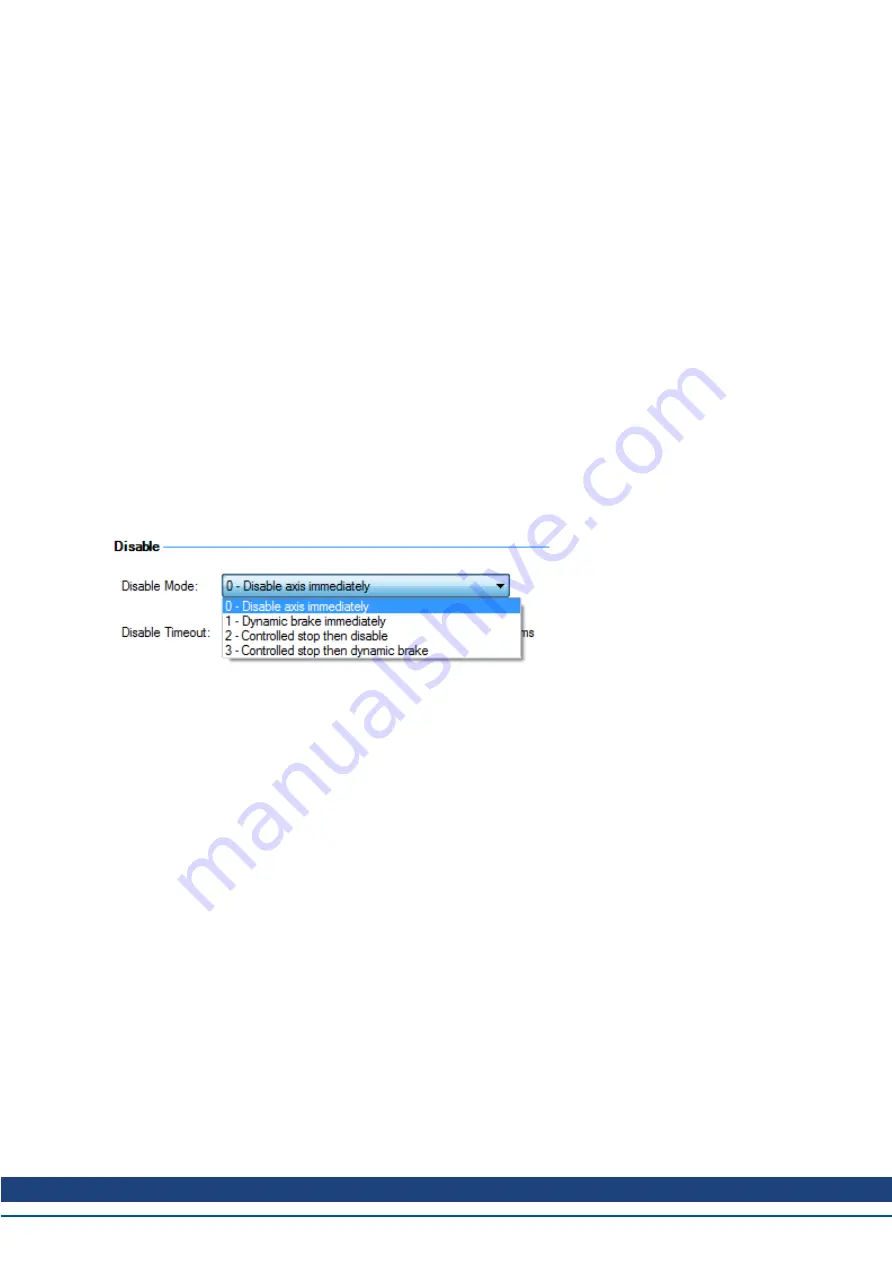
10.2.2 Disable Modes
Use DRV.DISMODE to select the method for stopping the drive.
Mode 0: Immediately disable drive.
With this condition, the drive will immediately disable the power stages and the driven motor will either
coast to a stop or in the case of a vertical or overhung load axis, will fall abruptly. If a brake is present, the
brake will be applied according to MOTOR.TBRAKEAPP. Using Digital Input mode 13, you can achieve a
controlled stop as described in Mode 2.
Mode 1: Dynamic Brake to a stop.
In this situation, the drive will use the dynamic brake feature and stop motion quickly, and then disable the
power stage. In most cases, the driven motor will stop quickly (pending the joules available and load cir-
cumstances). In the case of an overhung or vertical load, the driven motor will attempt to stop, but then
will continue to allow the load to fall if no measures have been taken to secure the load.
Note: for Modes 2 and 3, you can access the Controlled stop section to set the values of the controlled
stop deceleration rate, the velocity threshold, and time in velocity threshold to deactivate the drive.
Mode 2: Controlled stop, then disable.
In this mode, a controlled stop will take place based on a variety of parameters that you set. First, the
driven motor will decelerate at a controlled rate (CS.DEC) until one of two things happens. 1) The motor
reaches the velocity limit set (CS.VTHRESH) for a period of time (CS.TO), or 2) The drive emergency
time out is reached (DRV.DSTO). Once either of these cases is reached, the power stage will be disabled
(and brake applied if present)
Mode 3: Controlled stop, then dynamic brake.
Similar to Mode 2, the motor will decelerate at a controlled rate (CS.DEC) until CS.VTHRESH is reached
for a period of time (CS.TO). The drive will then dynamically brake and disable under the same conditions
as described in Mode 2.
Kollmorgen™ | December 2012
63
Содержание AKD PDMM series
Страница 25: ...This page intentionally left blank 25 Kollmorgen December 2012...
Страница 32: ...This page intentionally left blank 32 Kollmorgen December 2012...
Страница 52: ...This page intentionally left blank 52 Kollmorgen December 2012...
Страница 101: ...AKD PDMM User Guide 12 3 6 2 Biquad Calculations 101 Kollmorgen December 2012...
Страница 133: ...This page intentionally left blank 133 Kollmorgen December 2012...
Страница 158: ...AKD PDMM User Guide 17 Connection Diagrams Kollmorgen December 2012 158...
Страница 246: ...AKD PDMM User Guide 26 6 DIN1 INV to DIN7 INV Digital Inputs and Outputs 246 Kollmorgen December 2012...
Страница 340: ...AKD PDMM User Guide 33 11 FBUS TYPE 2 EtherCAT 3 CANopen 4 EthernetIP 5 Profinet 340 Kollmorgen December 2012...
Страница 470: ...AKD PDMM User Guide 48 27 VL THRESH 1 Velocity Loop 470 Kollmorgen December 2012...
Страница 511: ...This page intentionally left blank 511 Kollmorgen December 2012...
Страница 513: ...This page intentionally left blank 513 Kollmorgen December 2012...







































































