





























W W W . K A A R T A . C O M
6 3
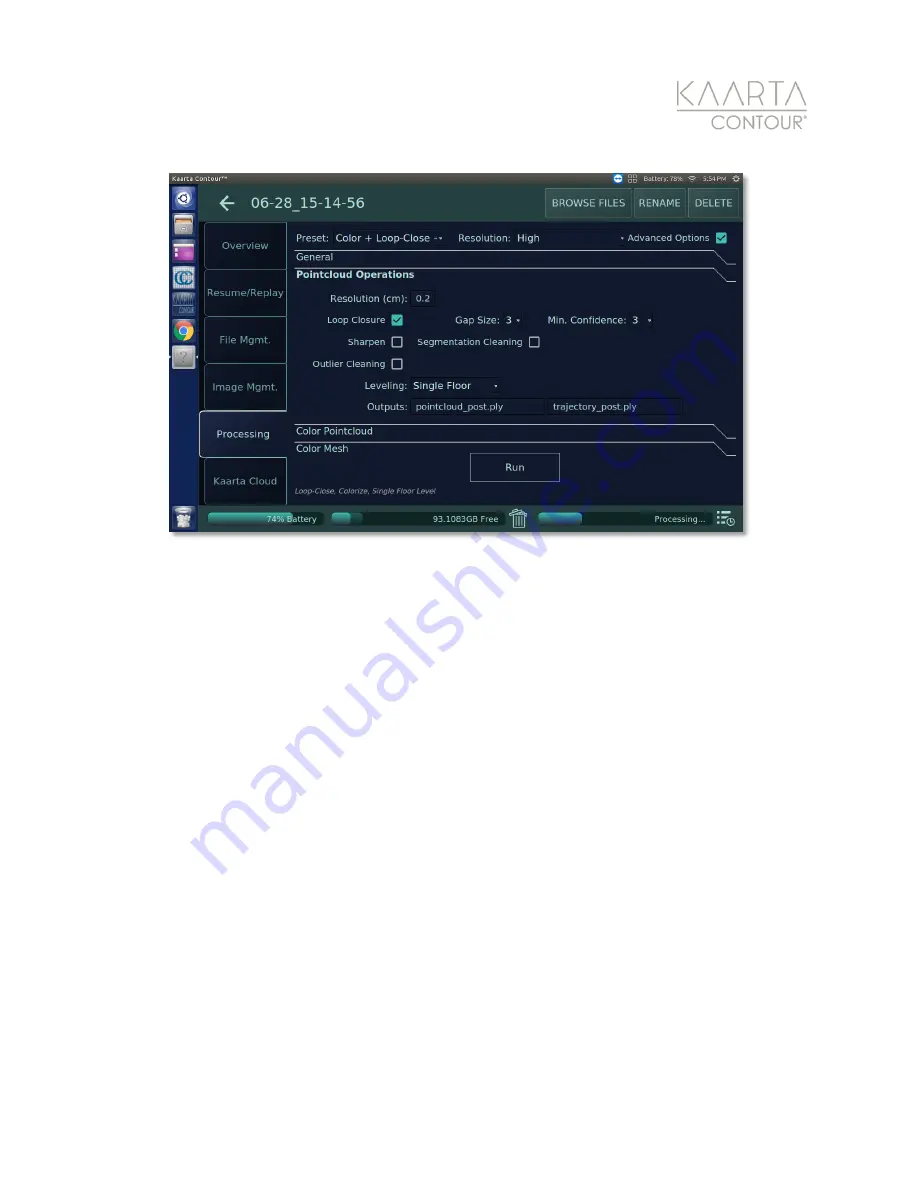
Figure 43: Pointcloud Operations Advanced Options.
The resultant pointcloud is downsampled from the automated steps based on the
resolution number set (in cm). For example, if the resolution is set to 0.2 cm, post-
processing will downsample the data such that two points are not closer than 2 mm (0.08
in) from each other. Cleaning operations are performed to remove sparse objects, and
sharpened to refine surfaces like walls, floors, etc.
C o l o r Po i n t c l o u d
Optionally, you can choose to turn on/off direct colorization of your pointcloud during post-
processing and to rename the output file (Figure 44). Please note that the automated
process only colors
certain
points that were seen by the color camera (e.g., those that were
not captured while moving quickly, including blurry or misplaced images) and the quality
of color is directly related to the quality and resolution of those captured pictures (Figure
45). The camera field of view (FOV) is substantially less than that of the lidar FOV. When the
camera is not capturing points for colorization, a red “X” displays in the lower right corner
of the HD Camera view (as shown in Figure 31).





















































