






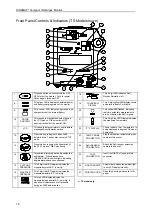


















DINAMAP*
Compact
Vital Signs Monitor
18
The system program is stored in a 4 Mbit FLASH memory IC28 as 512k by 8 bit words. Program
memory is provided by a low power 1 Mbit SRAM IC32 formatted as 128k by 8 bit words. Non-volatile
settings are stored in an EEPROM IC26 which talks to a dedicated serial port on the system processor.
All bus devices are powered from the +5VD digital supply, except for the RAM which is also powered
from the VRAM supply when the system is in “standby” mode.
Should the software detect a system fault or fail to reset its watchdog timer, the system processor will
output a logic low level on its watchdog output WDOG. This is latched as FAILSAFE by the output of
the bistable formed by IC31, allowing the output of the relaxation oscillator IC1 to pass through IC4 to
sound the piezo sounder LS1. The FAILSAFE signal is also used to disable the isolated power supply
module PM100.
The power supply board battery backup voltage BATT_BACKUP, derived from either NiCd battery or
an external supply, appears on the supervisory circuit IC35. This supervisory circuit has two functions.
First, it generates Reset and Halt signals for the system processor when the 5 volt power supply powers
on and off respectively. Secondly, it controls transistor TR8, allowing the 5 volt line to power the RAM
chip IC32 and PIC when the system is “on”, or the BATT_BACKUP to power the RAM and the PIC
when the system is “off”. This allows values to be saved in the otherwise volatile RAM and to maintain
the low power standby mode of the PIC.
Additional control signals from the system processor are decoded by IC16, which generates seven chip
select lines and IC17 which generates latch outputs for the LED display drivers. The data bus D0 ~ D7
is filtered by inductors L12~19 to produce a buffered data bus DB0 ~ DB7 for the display drivers.
There is also a PIC micro-controller IC5 on the power supply board 8620AB, which has its own
independent watchdog, reset circuit and provides the real-time clock function. The PIC provides control
of PSU status, battery charging, printer and alarm/annunciator audio output. Communications between
the system processor and the PIC are continually monitored in order to provide additional fail-safe
security for the monitor. All measurement, alarm and communications ports of the instrument are
isolated to IEC601.
2.4.2 Temperature System
The temperature system for the Model DINAMAP*
Compact
Monitor for reading predictive thermistor
probes is located on the Main Board 8610AB.
If a thermistor probe is used, the resistance of the probe varies in relation to temperature. The probe
resistance is effectively in parallel with R63 and therefore a change in temperature results in a change in
voltage applied to input selector IC19. The selected input voltage from IC19 is connected to the voltage
to frequency converter (VFC) IC18. The frequency of the square wave output from the VFC varies
proportionately to the input voltage. The output signal is isolated through opto-coupler PC2 and enters
the system processor, as PRED_TEMP_F. The processor receives the square wave signal and
determines the temperature by counting the number of edges received per unit interval.
Through the application of a software algorithm, the system processor provides two select lines
TEMP_SEL0 and TEMP_SEL1. These are isolated by opto-isolators PC3 and PC4 and used to control
the input selector IC19, allowing the appropriate resistor tree to be selected. There are four selectable
channels, two providing calibrations points, a third used for probe type detection and the fourth for the
thermistor measurement.
The probe type is determined by measurement of the frequency produced by the VFC from a DC input
derived from resistor tree R59-R61; for an oral probe this produces a frequency equivalent to 42
degrees Celsius, Rectal probes short out R61 and hence change the frequency slightly. The software is
capable of determining which probe type is attached and hence selects the appropriate measurement
mode.
Compensation for drift in accuracy of the system is achieved by the unit recalibrating itself on switch on
and after each measurement and at ten minute intervals. Calibration is achieved by measuring two