





























Description of functions
4 Description of functions
4.1 Introduction
The CANlink II offers the two operation modes CANlink (RS232-CAN Gateway)
and COPlink (RS232-CANopen Gateway).
In the CANlink mode, the device transmits the data that arrive on the serial port
to the CAN bus under a configurable identifier. In the same way, data that are
received via CAN by means of another configurable identifier are passed on to the
serial port.
The identifiers, CAN parameters and the parameters of the serial port used can be
freely configured.
In the COPlink mode, the databytes that arrive on the serial port are transmitted
on the CAN bus via TxPDO. Conversely, the data received via a certain RxPDO are
passed on to the serial port. On the CANopen side, the
”Byte Stream Protocol“
is used as the communication protocol.
The CANlink II can be configured via the serial port with the aid of a download
tool.
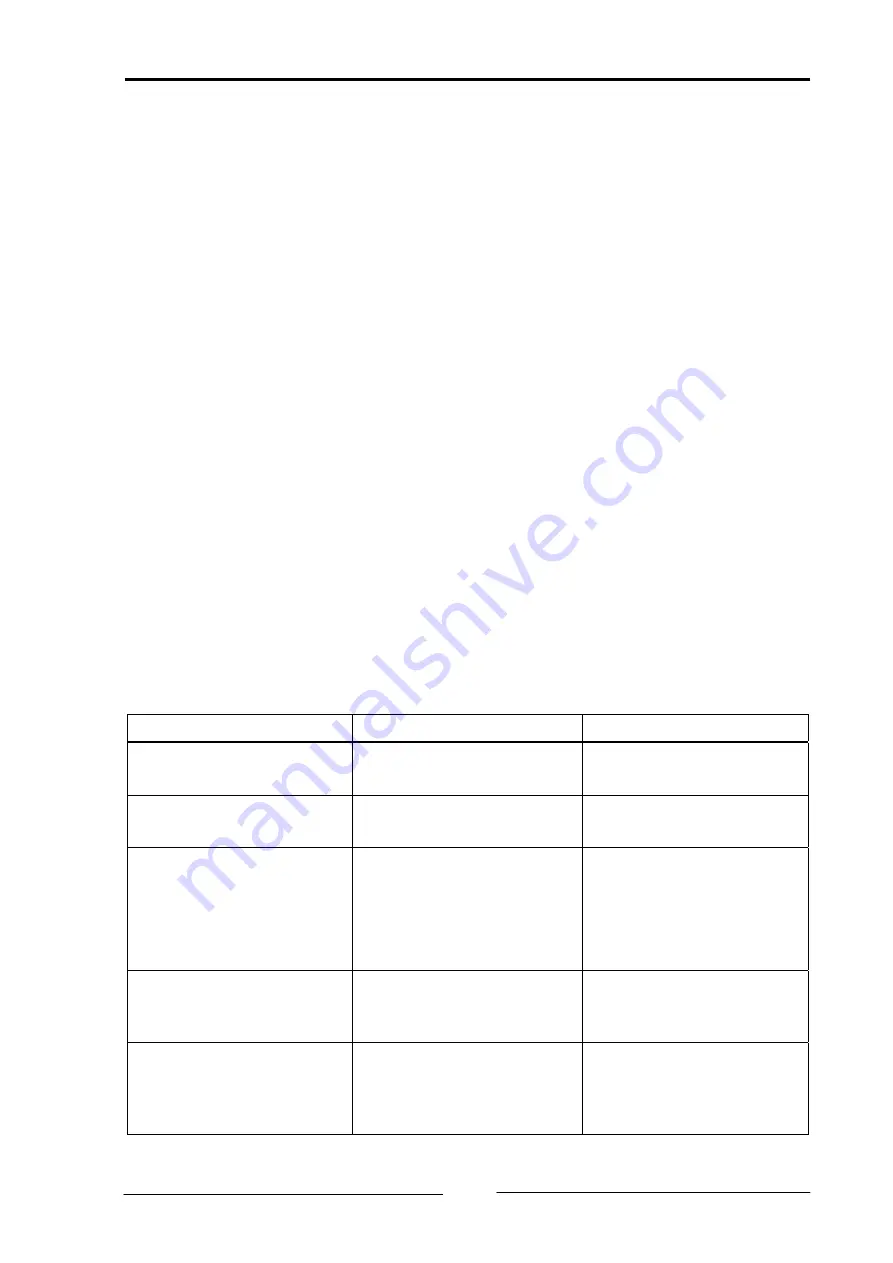
4.2 RS232-CAN
gateway
Table 4-1 shows the functions and the associated key words, relevant for the
CANlink mode.
Function
Possible settings
Key words
Operation mode
CANlink
OperationMode
(under [General])
Timeout
0 - 6,5 s
Timeout
(under [General])
RS232 parameter
1. Baudrate
2. Number of databits
3. Parity
4. Flow control
RS232baudrate
Databits
Parity
Handshake
(all under [RS232])
Baudrate for
CAN bus
1. Setting of a CiA baudrate
2. Setting the bus timing reg-
ister BTR0 / BTR1
CANbaudrate
(under [CANBus])
Frame Format for
CAN bus
1. Standard Frame Format
(11bit identifier)
2. Extended Frame Format
(29 bit identifier)
FrameFormat
(under [CANBus])
Copyright IXXAT Automation GmbH
CANlink II - Manual, V1.3
17







































































