





























Optidrive P2 Elevator User Guide V2.30
35
First Start-up of Geared (Induction) Motors.
www.InvertekDrives.com
Step 6 - Encoder Setup (If Encoder is installed)
Action
Additional Information
Enter Encoder Resolution
Enter encoder pulses per revolution into P6-06
Refer to Encoder datasheet or nameplate.
Check motor direction and
encoder direction is
correct.
During this check you will need to Navigate
between parameters P0-25 (Estimated motor
speed) and P0-58 (Encoder speed).
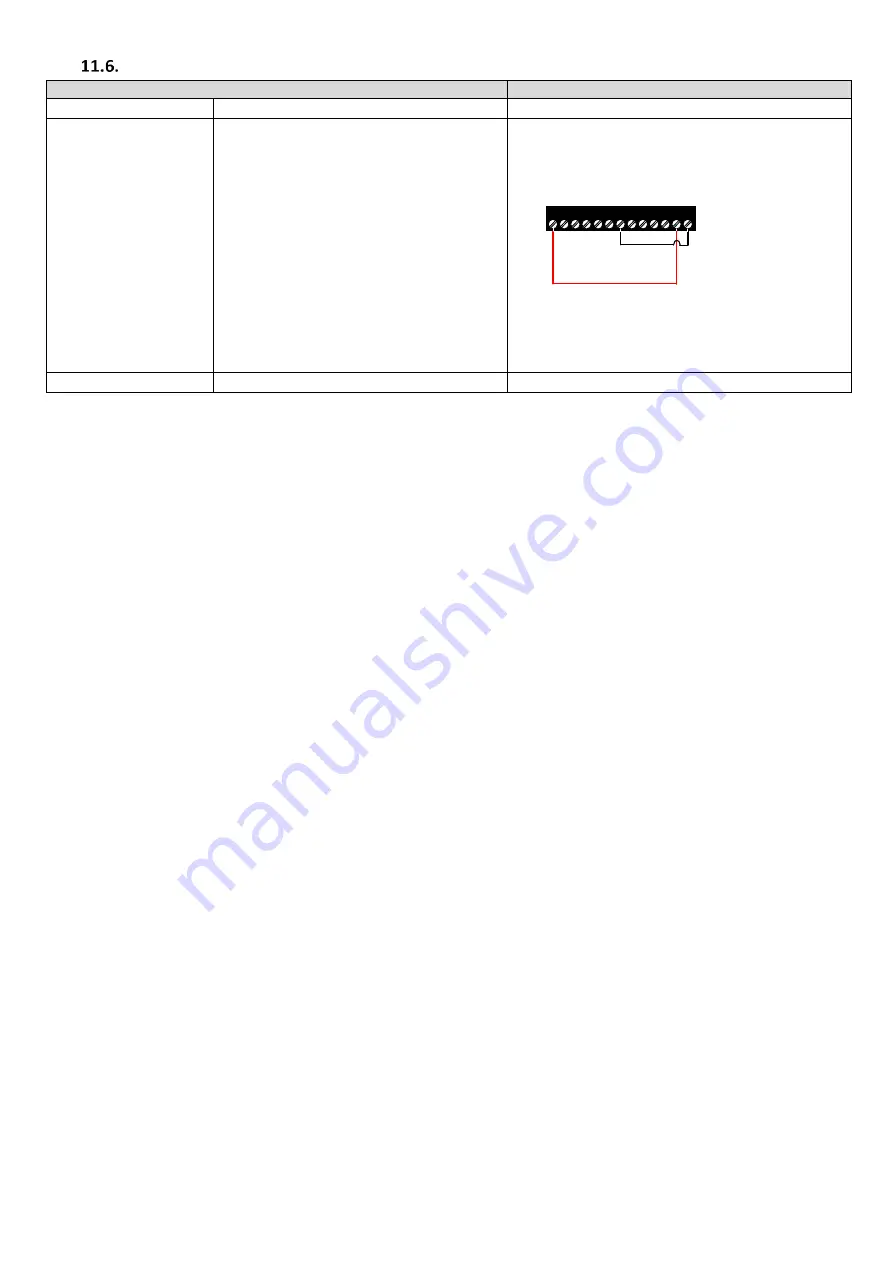
Provide a run-direction command to terminal 2
and run at low speed for a short travel e.g.
levelling/10% of motor rated speed, you can Use
P1-01 (Maximum speed limit) to limit the motor
speed and return back to normal value
afterwards.
Check that the value shown in P0-25 is positive
in the Up direction and Negative in the down
direction, if it is not then set P4-13 to 1.
Check that the value in P0-25 and P0-58 match
in sign.
If the drive shows
when a run-direction
command is given ensure that the Safe Torque off
inputs are made.
1 2 3 4 5 6 7 8 9 10 11 12 13
Enable Encoder
Set P6-05 to 1
Enables Encoder Feedback
Once steps 1 through to 6 above have been performed go to Section 13 Comfort Optimisation





















































