





























- 69 -
4 Operation Panel
4
●
In parameter display mode, set H02-32 and select the parameters to be pre-monitored, and the opera-
tion panel switches to the monitoring display mode.
●
Once a fault occurs, the operation panel immediately enters the fault display mode, and all 5-digit LEDs
blink. Press the SET key to stop the LED blinking, and then press the MODE key to switch over the
parameter display mode.
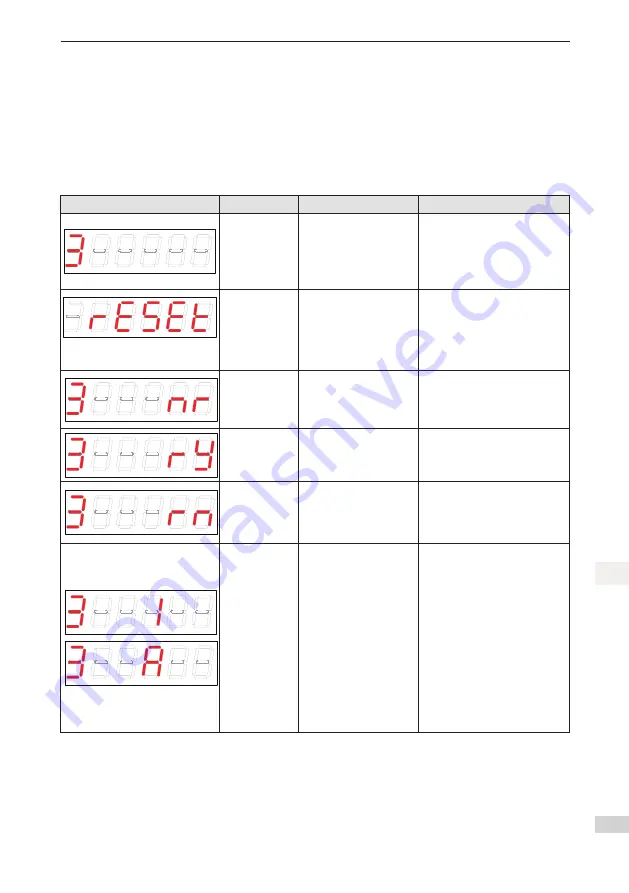
4.2.1 State Display
In this section, the current operation axis 3 is taken as an example.
Display
Name
Situation
Meaning
3
Axis number
currently
operated (as
example only)
The axis number is
selected and parameters
are displayed (axis
number is not displayed
on specific parameter
setting interface).
Parameters displayed on the
operation panel currently are
parameters of axis 3
(Axis number is not displayed in
reset state)
reset
Servo
initialization
Moment at servo power-
on.
The servo drive is in initialization
or reset state.
After initialization or reset is
completed, the servo drive
automatically switches over to
another state.
nr
Servo is not
ready (Not
ready)
Initialization is completed,
but the servo drive is not
ready.
The servo cannot operate as the
power-on of main circuit fails to
meet the specifications.
ry
Servo is ready
(Ready)
The servo drive is ready.
The servo drive is ready for
running, and waits for the servo
enable signal from the host
controller.
rn
Servo being
running
(run)
The servo enable signal
is active.
The servo drive is in running
state.
1–A
Control mode
It displays the current operation
mode of the servo drive in
hexadecimal digits.
1: Profile position control
3: Profile velocity mode
4: Profile torque mode
6: Homing mode
8: Cyclic synchronous position
mode
9: Cyclic synchronous velocity
mode
A: Cyclic synchronous torque
mode
Содержание SV820N Series
Страница 127: ...126 6 Trial Running 6 6 5 6 PLC Program 1 Add an FB file that edits the function block in the application...
Страница 128: ...127 6 Trial Running 6 2 The definition part of FB 3 Five function blocks in FB...
Страница 141: ...140 6 Trial Running 6 In section0 call the function block then the axis can be moved by the bus...
Страница 143: ...142 6 Trial Running 6 3 Open Visual studio and create a New Twincat3 Project...
Страница 146: ...145 6 Trial Running 6 Click OK Click OK...
Страница 147: ...146 6 Trial Running 6 Click Yes Click OK...
Страница 149: ...148 6 Trial Running 6 C The default RPDO list is as follows...
Страница 150: ...149 6 Trial Running 6...
Страница 152: ...151 6 Trial Running 6 7 Activate the configuration and switch over to the running mode Click...
Страница 157: ...156 6 Trial Running 6 Add a motion control library making it easy to call the control function block...
Страница 158: ...157 6 Trial Running 6 Create a new POU...
Страница 159: ...158 6 Trial Running 6 Create a new FB add MC_power MC_jog MC_home MC_absolute MC_reset to FB...
Страница 160: ...159 6 Trial Running 6 Call axis_motion in main Call the program in PLCTASK...
Страница 161: ...160 6 Trial Running 6 Compile the program if there is no fault configuration can be activated and then log in to the PLC...
Страница 181: ...Revision History Date Revised Version Revised Details May 2017 A00 First release...







































































