





























Chapter 4 - Programmation
35
XtrapulsCD1-pm - User manual
3.5 - GEARING SEQUENCE
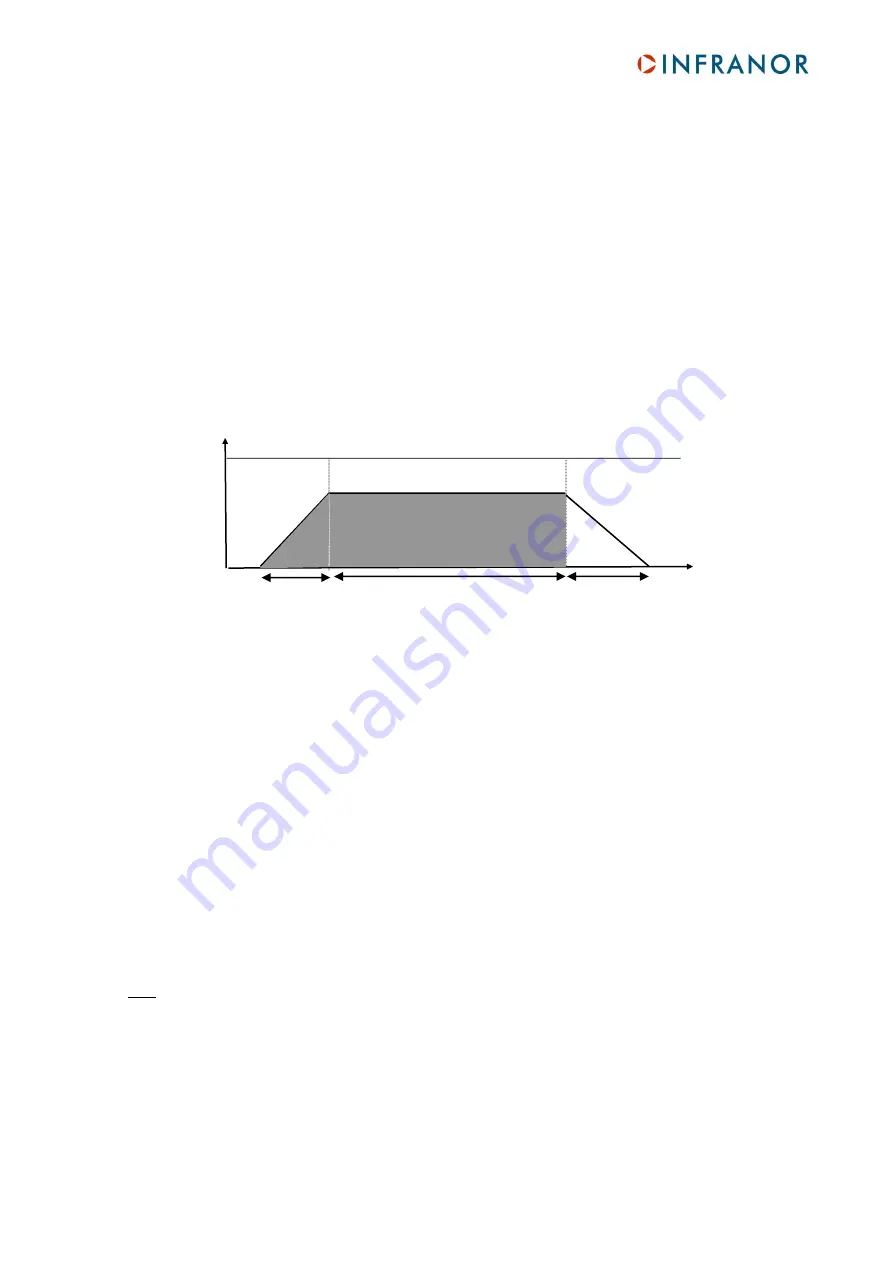
A gearing sequence is defined by:
- the gearing distance,
- the gearing ratio factor,
- the gearing direction,
- the acceleration time,
- the deceleration time.
At the start of the sequence, the motor speed is ramping according to the acceleration parameter value. When the
motor speed value reaches the second sensor velocity, the motor position is locked in phase and frequency with
the second sensor position according to the gearing ratio value. The
Gearing ratio
is defined by the
Position
resolution
and the
Position scaling factor
parameter values (
see chapter 2 Commissioning, section 14.2
).
During the sequence execution, this value is multiplied by the sequence gearing ratio factor. The
Reverse
gearing
selection allows reversing the motor displacement direction with regard to the second sensor
displacement. The servo motor (slave) is following the second sensor position (master) up to the output position
value.
The output position value is equal to the gearing sequence start po the distance parameter value. When
the output position is reached, the motor is stopped according to the deceleration parameter value. If the
deceleration parameter value is set at 0, the next sequence is immediately executed.
The acceleration and deceleration times parameters define the time with regard to the
Maximum Speed
parameter value as in a positioning sequence or a homing sequence.
When the distance value is set at 0, the stop condition can be used for stopping the sequence.
3.6 - SEQUENCES CHAINING
3.6.1
– COUNTER LOOP
The sequences linkage is controlled by the “Next sequence”, “Counter” and “Jump” parameters.
Application example:
Sequence 1:
Next sequence = 2
Counter = 0
Jump = -1
Sequence 2:
Next sequence = 3
Counter = 2
Jump = 1
Sequence 3:
Next sequence = -1
Counter = 0
Jump = -1
Note: "Next" = -1 or "Jump" = -1 corresponds to an empty field in the PC software.
Master speed
Acceleration
Deceleration
Motor speed = Master speed x Gearing ratio x Gearing ratio factor (%) / 100
Master/slave synchronisation
Distance value





















































