





























Chapter 9 Special Functions
9.1 Multi-Slider Excess Approaching Detection (Collision Prevention) Feature
9-2
ME0392-4C
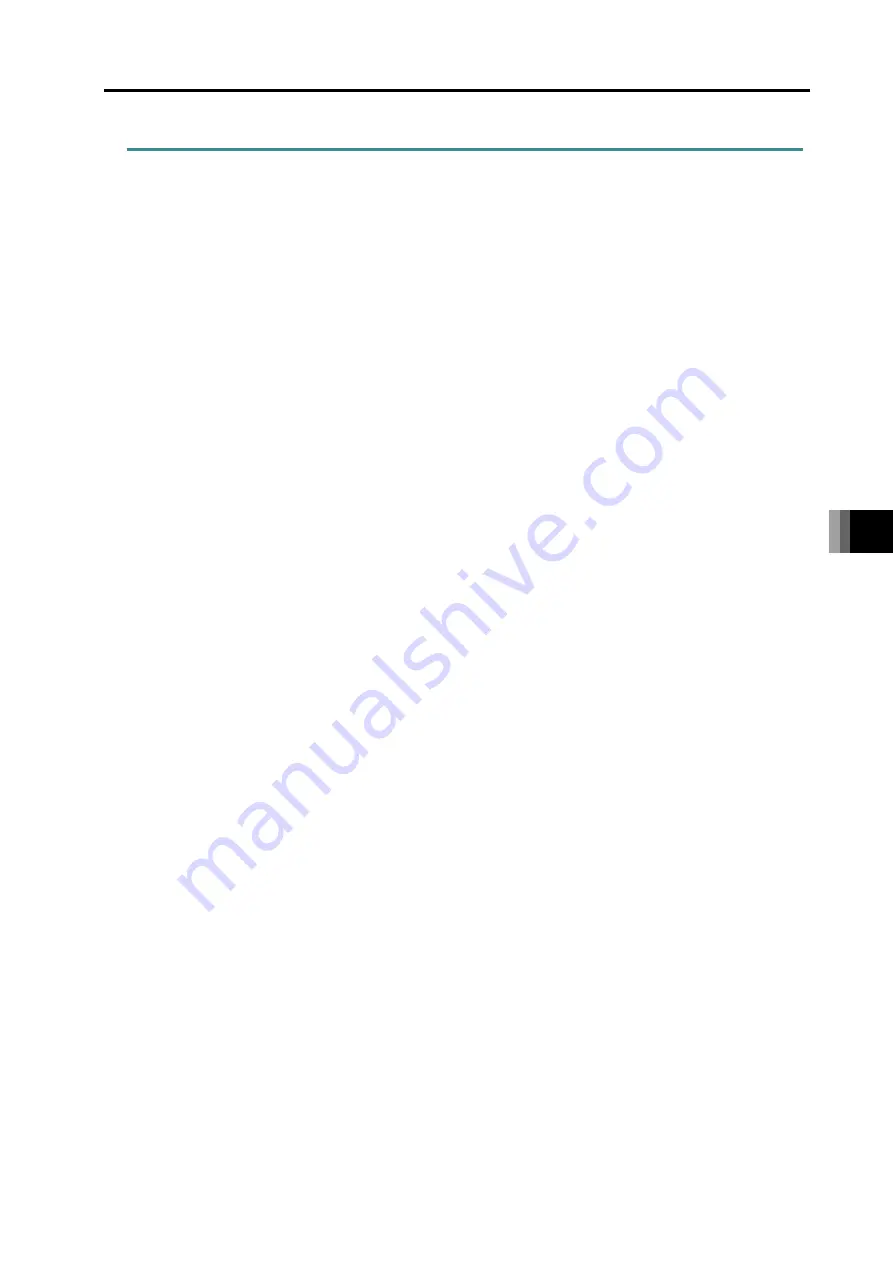
9.1.1 Setting method
Establish the RSEL axis settings.
This operation should set the multi-slider excess approach detection feature enabled.
(Axis Parameter No.41 “Multiple Slider Excess Approach Detection Target Axis Indication”)
Soft limit -
Soft limit +
Multi-Slider Effective Stroke
Multi-Slider Effective Stroke
Soft limit +
Soft limit -
Min. Distance Between Sliders
1st Axis
2nd Axis
Stop Judgment Position
1st Axis
2nd Axis
Min. Distance Between Sliders
Multi-Slider Setting Bit Pattern1
Actual Position Excess Approaching Margin /
Command Position Excess Approaching Margin
(Axis
parameter No.43)
9.1 Multi-Slider Excess Approaching Detection (Collision Prevention) Feature
ME0392-4C
9-3
9.1.2 Related parameter
The following parameters are the related parameters. There is no need of changing the initial
parameters set at delivery.
[1] Emergency Deceleration Margin at Multi-Slider Over Approach : Axis parameter No. 42
Judgment should be made with this margin added to the deceleration in the judgment
whether stop is available within the multi-slider command position excess approaching
detection margin if an emergency stop is with excess approaching by issuing a movement
command.
This is valid only in the parameter on the master axis of the multi-sliders (The smaller axis
number).
• Initial setting : 0.05 G
[2] Multi-Slider Setting Bit Pattern 1 : Axis parameter No. 43
(1) Bits 0-3: Multi-slider actual position over approach detection margin [mm]
It is used for judgment of the multi-slider actual position excess approaching error. An error
should be generated when approach was made for the distance set from the minimum
distance between sliders.
It is necessary to establish the setting of distance shorter than the minimum distance
between sliders.
This is valid only in the parameter on the master axis of the multi-sliders (The smaller axis
number).
• Initial setting : 2 mm
(2) Bits 4-7: Multi-slider commanded position over approach detection margin [mm]
It is used for judgment for the multi-slider command position excess approaching error. It
should generate an error when judgment is made that it cannot be stopped before
approaching from the minimum distance between sliders further to the set distance.
It is necessary to establish the setting of distance shorter than the minimum distance
between sliders.
This is valid only in the parameter on the master axis of the multi-sliders (The smaller axis
number).
• Initial setting : 1 mm
[3] Multi-Slider Over Approach Detection Effective Stroke: Driver Unit Parameter No. 197
This means a position where Distance between sliders at the furthest ends [mm] - Distance
between sliders [mm] at the closest position, and the setting is established to the most
optimum at delivery.
Set it lower and an error should be generated with sliders at further positions.
Содержание R-unit RSEL
Страница 2: ......
Страница 5: ...ME0392 4C 2 Quick Start Guide Japanese Only ...
Страница 32: ...Actuator Coordinate System Intro 18 ME0392 4C 2 Slider type 3 Table type 0 0 0 0 ...
Страница 50: ...Chapter 1 RSEL System 1 4 Installation 1 13 ME0392 4C ...
Страница 82: ...Chapter 2 System Configuration and Power Specifications 2 6 Drive Source Cutoff 2 30 ME0392 4C ...
Страница 244: ...Chapter 4 Unit connection Installation and Wiring 4 5 PIO Circuit 4 32 ME0392 4C ...
Страница 249: ...Chapter 4 Unit connection Installation and Wiring 4 7 Brake Box Option ME0392 4C 4 37 Appearance ...
Страница 251: ...Chapter 4 Unit connection Installation and Wiring 4 7 Brake Box Option ME0392 4C 4 39 Appearance ...
Страница 316: ...Chapter 5 Operation 5 10 ELECYLINDER Operation 5 52 ME0392 4C ...
Страница 438: ...Chapter 6 Field Network PIO SIO 6 5 Example of Connectivity Setting 6 120 ME0392 4C ...
Страница 472: ...Chapter 7 6 axis Cartesian Robot 7 2 Caution When Using Orthogonal Coordinate System Features 7 33 ME0392 4C ...
Страница 530: ...Chapter 9 Special Functions 9 6 RSEL Serial Communication Multiple Channel Applicable Features 9 38 ME0392 4C ...
Страница 532: ...10 6 Servo Gain Adjustment 10 90 10 7 Parameter Configuration Advanced Use 10 93 ...
Страница 638: ...Chapter 10 Parameter 10 7 Parameter Configuration Advanced Use 10 106 ME0392 4C ...
Страница 838: ...Chapter 14 Warranty 14 Warranty 14 3 ME0392 4C ...
Страница 843: ......
Страница 844: ......