





























Hypersen Technologies Co., Ltd.
HPS-FT-USER V1.8
21
/
38
(In general, the robot is controlled to move 10mm along axis Z- of the end tool. You can
decide whether or not to open the gripper or change the tool quickly according to the
different stations of the robot to ensure that its withdrawal from the collision will not
cause secondary damage.)
⑦
The robot returns to the safe area after withdrawing from the collision area
⑧
<ZERO>//Reset sensor
<
⑨
<
ALARM_ON
0 1>////Re-enable the alarm function
⑩
<ALARM_CLEAR 0>//Clear alarm information
5 Host demonstration software
You can use this software to connect to the 6-axis force torque sensor via Ethernet or serial port. With the
host software, you can view the waveform graph and 3D vector graphics of the sensor to familiarize yourself
with the force sensor, and carry out communication diagnosis.
5.1 Ethernet-based host demonstration software
It is suitable for 6-axis force torque Ethernet adapter.
5.1.1 Ethernet connection steps
Steps: 1. Provide a PC with Windows system.
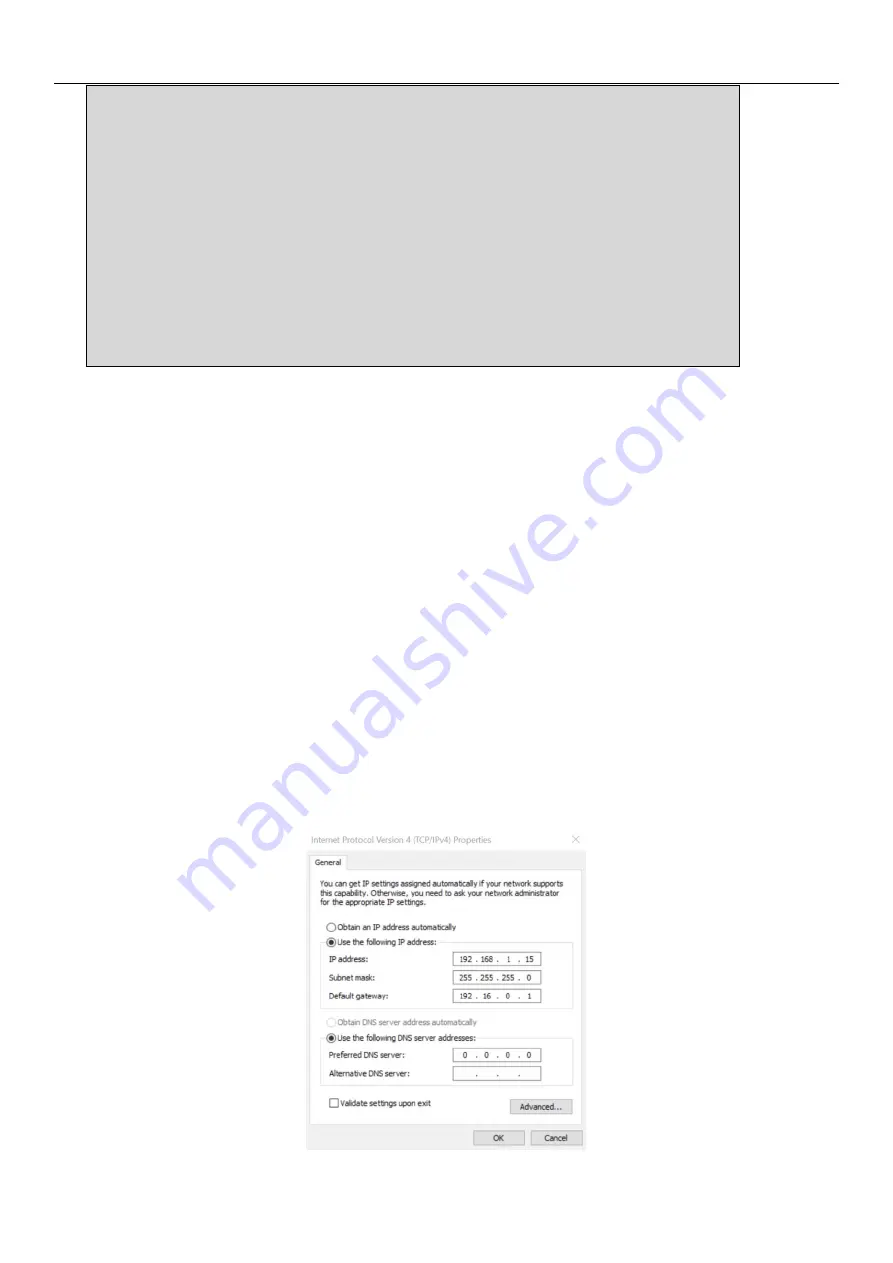
2. Set the network port of the PC. Make sure that the PC and the sensor are in the same network
segment 192.168.1.X and do not conflict with each other.