























WenZhou ZhengBang Electronic Equipment Co., Ltd
ZB4050LS Rev 1.1
33
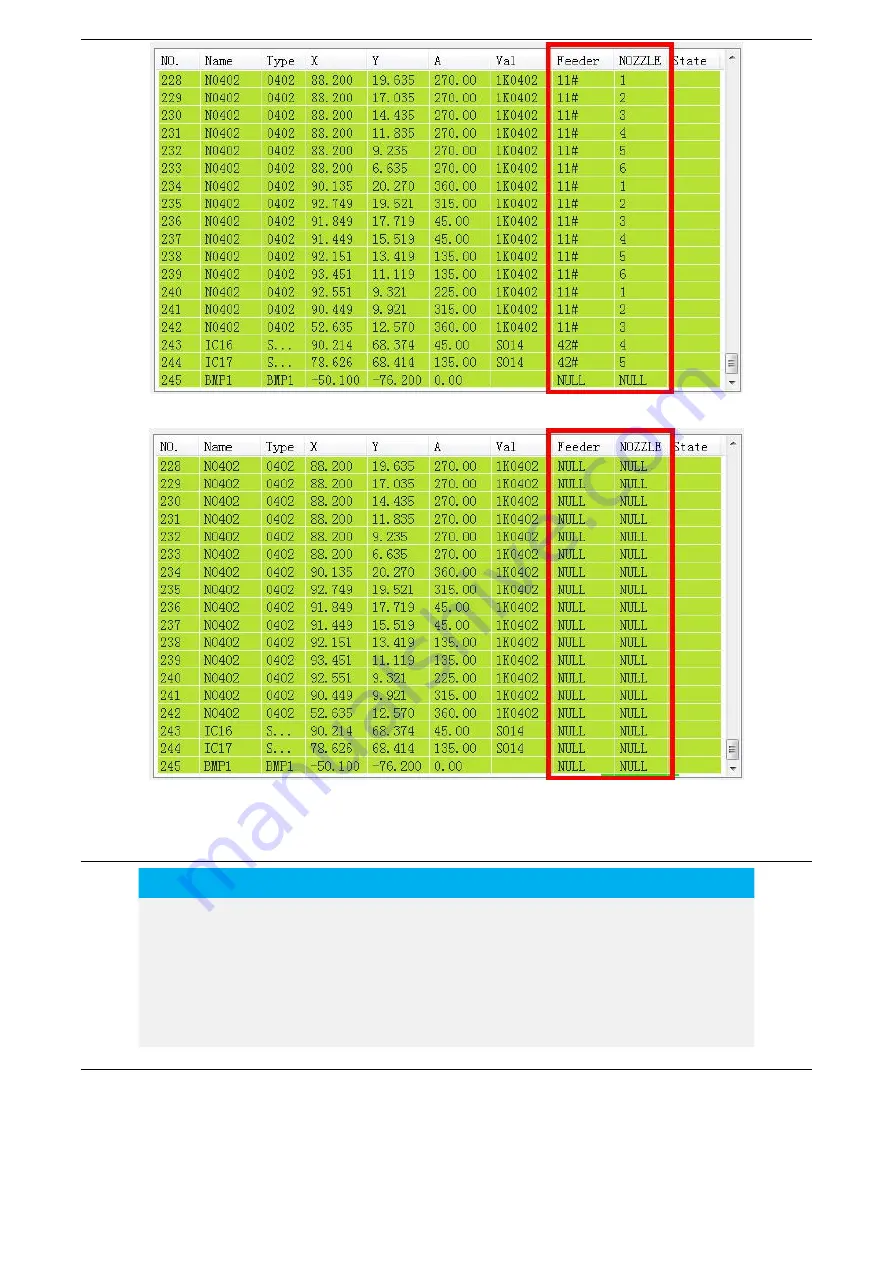
Fig.5-2 Unmatched Status
Fig.5-3 Matched Status
5-2 Production & Placement
NO.
Step
Content
1
Production
Normal automatic production placement mode
2
Single step
Single step production placement mode
3
Jump
Jump to any component as the initial placement position to produce
4
Trial mount
Non-suction production mode
5
Feed
Specified component or feeder feed production
5-2-1 Automatic Production
1.Click “Start” to recognize and calibrate the mark offset.
Содержание ZB4050LS
Страница 1: ...WenZhou ZhengBang Electronic Equipment Co Ltd ZB4050LS Rev 1 1 ...
Страница 45: ...42 ...







































































