





























Assembly and Commissioning Instructions Servo amplifier D1-N
15.10.2015
139 / 183
9.4
First travel subject to control
Under “Position Units” define a unit which is appropriate for your application. Enter
realistic values and start with lower values for “Speed”, “Acc”, “Dec” and “Dec.
Kill”.
Now start the control process by clicking on the “Enable” button.
CAUTION!
The motor is now energised and will commutate if this has not already been
done. Depending on its position, it may jerk a little.
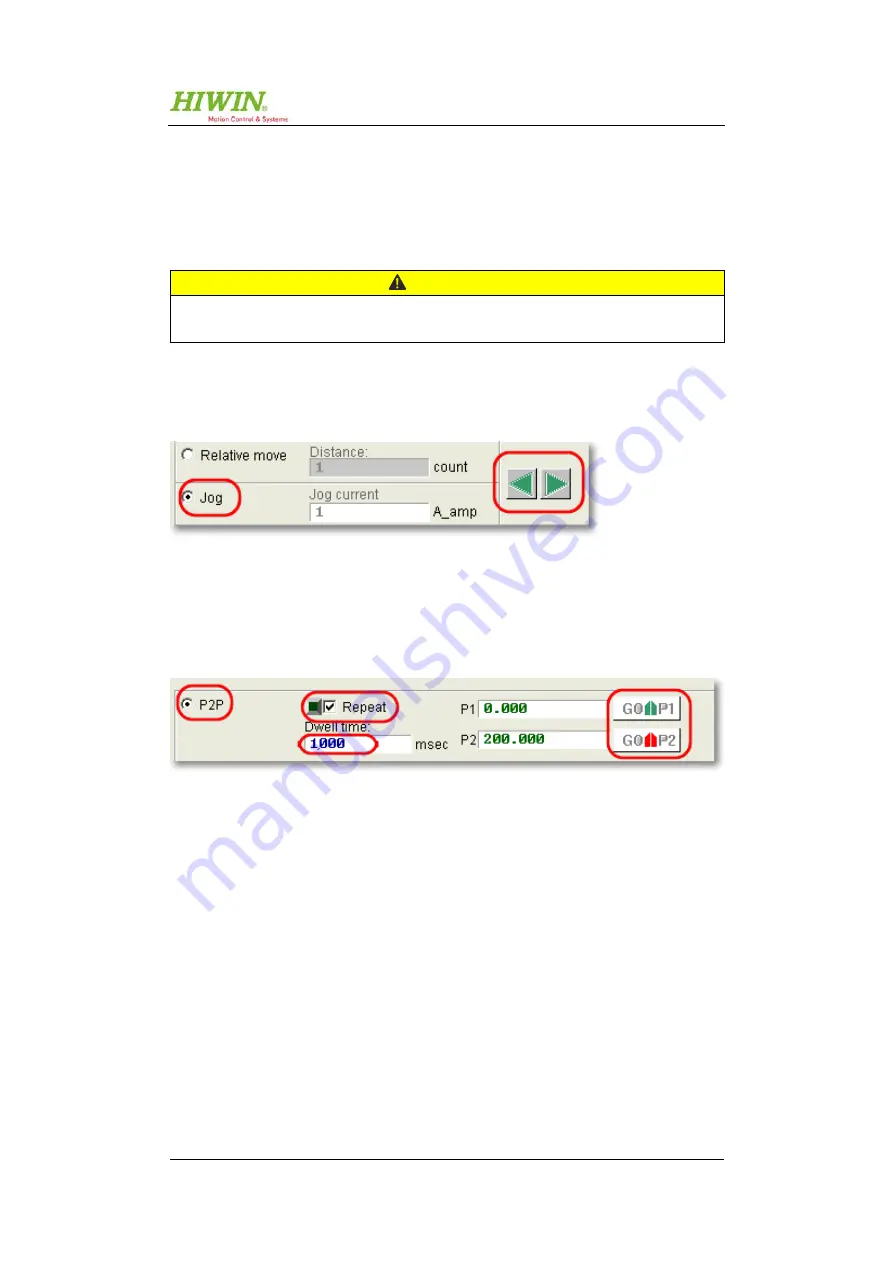
Now check whether the motor can be moved. To do this, go to “Jog” mode and
move the motor with the green arrow buttons.
Figure 9.28: Jog mode
Once the speed and acceleration have been tested in “Jog” mode, you can use the
“P2P” function to keep the motor in permanent motion and test other parameters
in the process.
Figure 9.29: Point-to-point movement
To keep the motor in continuous motion, tick “Repeat” and enter permissible posi-
tions for “P1” and “P2”. The motor is moved back and forth between these two
positions and waits the time specified (“Dwell time”) each time a position is
reached. Start the movement by clicking on the “GO P1” or “GO P2” button.
While the motor is moving, if needed you can adapt parameters such as speed,
acceleration and amplifications in order to test the impact of such changes.