




























58
3.5 W Module HM-W200C
The W module is a dedicated 2-axis positioning module for stepping motors.
It is provided with stepping motor driver I/F and motor sensor inputs (the four pins: ±ELS, OLS, and DLS) for
two axes. It does not have an encoder FB signal input.
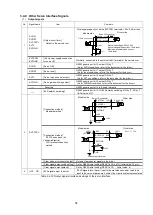
3.5.1 Specifications
Category
Item
Specifications
Remarks
Basic
specification
ASIC for Motionnet control G9003
2
by Nippon Pulse Motor
Axis control system
control method
2-axis control
Single axis positioning
Position command
Command pulses
Positioning pulse-train command output
Output element: Differential driver
Position command range
-134,217,728 to +134,217,727 [pulse] [28-bit
long]
Command coordinate
Relative coordinate command
Command range for
continuous feed
Unlimited
Position override
Possible
Change target position before position
completion
Speed control
Speed range
0.1 pps to 6.6 Mpps (x0.1 to x66.6)
0.1 time mode: 0.1 to 10kbps
1 time mode: 1 to 100kbps
10 times mode: 10 to 1Mbps
50 times mode: 50 to 5Mbps
[Speed register range: 17 bits, Range of setting
value: 1 to 100,000]
Speed override
Possible
Acceleration/deceleration
control
Automatic
acceleration/deceleration
system
S-curve acceleration/deceleration, partial s-curve
acceleration/deceleration, and linear
acceleration/deceleration
(All with triangular drive peak prevention function)
During automatic acceleration/deceleration:
Asymmetrically sloped acceleration/deceleration
possible
Acceleration/deceleration range during
the slope of acceleration/deceleration
Example of accelerating from 50pps to
1Mpps:
Linear acceleration/deceleration: 0.5ms
to 261s
S-curve acceleration/deceleration: 1ms
to 522s
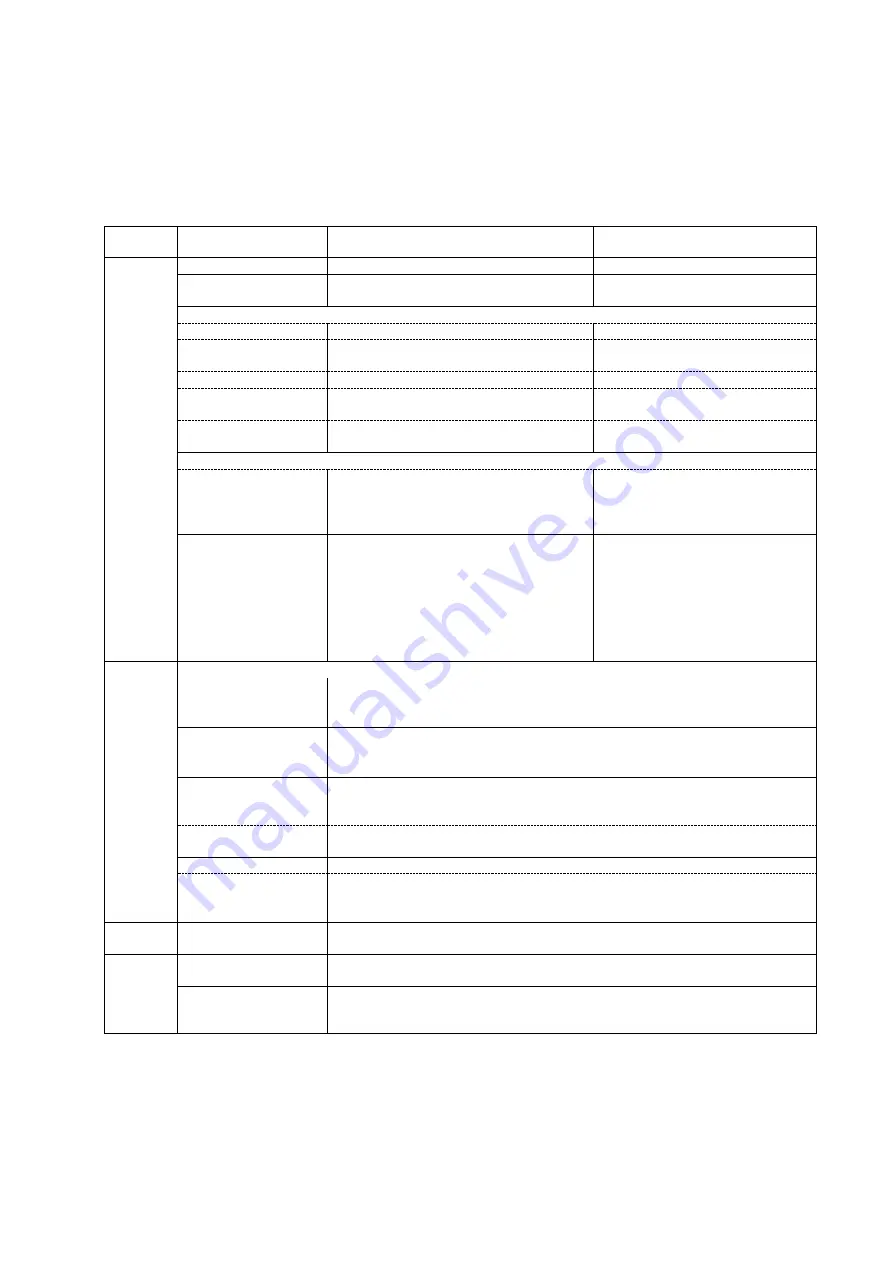
Function
specifications
Homing control
Homing method
13 ways of
returning to a sensor’s origin, Z-phase origin, or ELS shared origin
Origin search
Available
Origin offset
Available
Counter function
Counter 1: command position (command pulse count) [28-bit long]
Counter 3: general-purpose counter [17-bit long]
Comparators
Three comparators are available. These can be used for any counter above.
Backlash compensation
Compensation pulses are inserted immediately before command operation for every turn of
the movement direction.
Counter during compensation can be enabled or disabled.
Vibration reduction when
stopping
Effective to suppress vibrations caused by stepping motor stop
Machine Interface
ELS, OLS, DLS (all insulated with photocouplers)
Driver interface
Command-pulse output (O.C.)
Output: excitation OFF, step angle switching, automatic current-down prohibition (all O.C.)
Input: excitation timing (insulated with photocoupler)
Safety
feature
Communication
cable
disconnection detection
Upon detection, motion control is reset (with power ON).
When the communication settings switch (the 2nd switch) is OFF.
Safety
feature
Environment
requirement
s
Overcurrent protection
A PTC thermistor (poly switch) cuts the current when the current flowing through its
receiving terminal exceeds a certain amount.
Power supply
DC +12V to DC +24V
Содержание motionCAT HCPCI-MNT720M
Страница 1: ...Motion Network System motionCAT series User s Manual Introduction Hivertec inc http www hivertec co jp...
Страница 3: ......
Страница 12: ...1 Warnings and Precautions...
Страница 20: ...9 1 motionCAT Installation...
Страница 109: ...98 4 Installation Guide...
Страница 118: ...107 5 Device Driver Installation...
Страница 122: ...111 6 Trial Operation...
Страница 145: ...134 7 Accessories...
Страница 147: ...136 8 Glossary...
Страница 161: ...150 9 Connections to Drivers Supplied by Manufacturers...





















































