





























66
Installation and user guide
Rev: 4.0
NTT 240/460
Operation mode
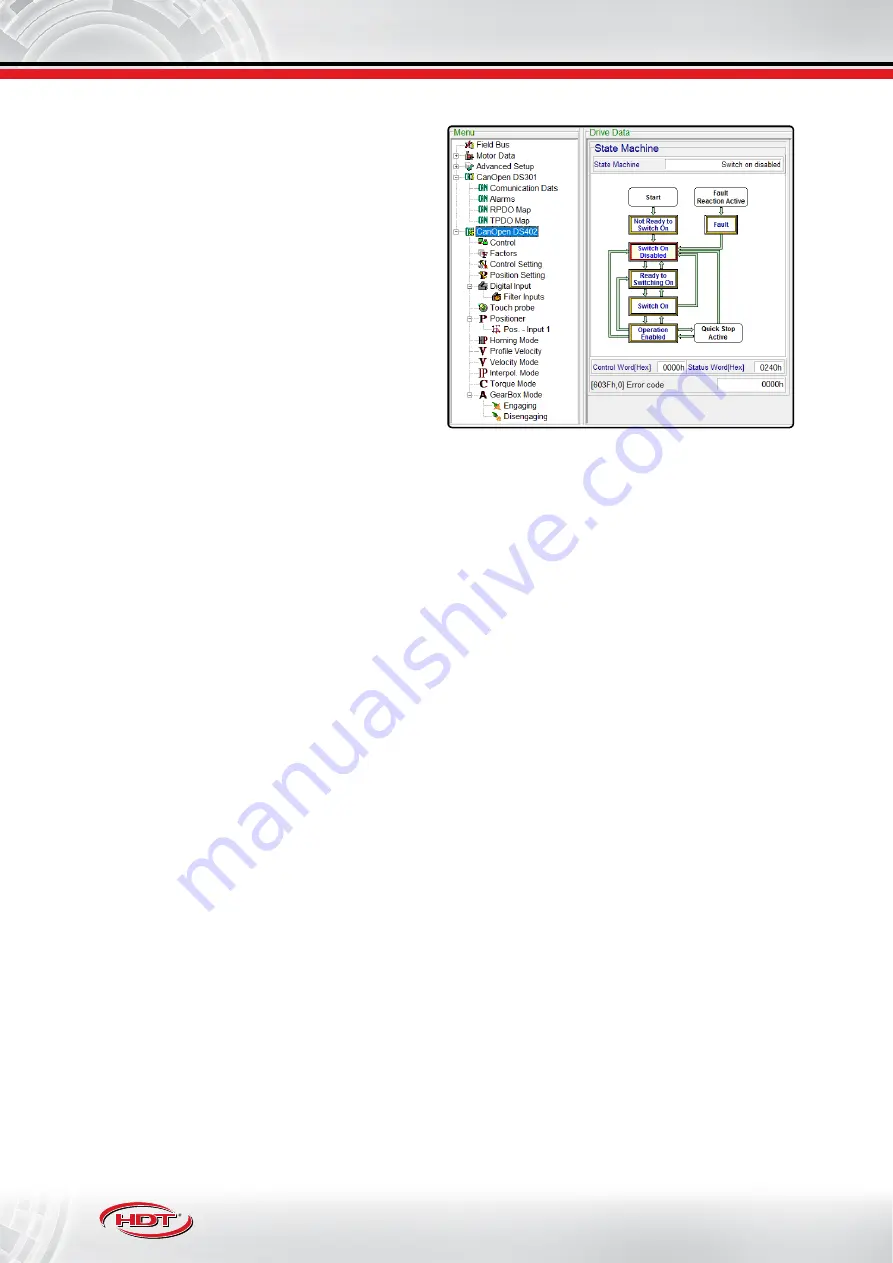
6.03.4.c Canopen® operation mode: Canopen CiA301 and Canopen CiA402
item
Control type and state machine in picture:
•
Position Mode
•
Velocity Mode
•
Profile Velocity Mode
•
Profile Torque Mode
•
Homing Mode
•
Interpolated Position Mode
•
Cyclic Sync Position Mode
•
Cyclic Sync Velocity Mode
•
Cyclic Sync Torque Mode
•
Touch Probe
•
Electronic Gear
•
Pressure control
During fieldbus operation mode, Caliper software shows all Canopen parameter addresses, nearby the parameter.
Same Canopen protocol implemented inside NTT 240/460 drive is è compatible with all other H.D.T. drive families
that support it.
Canopen CiA301
sub-menu items are listed below:
1.
Comunication Data:
guard time setting and parameters saving in EEPROM (according to Canopen® standards).
2.
Alarms:
alarms setting and erasing.
3.
RPDO MAP:
RPDO map visualization.
4.
TPDO MAP:
TPDO map visualization.
Canopen CiA402
sub-menu items are listed below:
1.
Control:
Canopen® Control Word and Status Word informations.
2.
Factors:
multiplier factors associated with input reference in order to modify scale resolution. Please see
3.
Control setting
: Stop mode management during Fault Reaction, HALT conditions and comunication timeout.
For further information, please see
“6.04 Emergency stop functions” pag. 71
. Stop mode available are shown
below (selectable from dropdown menu):
•
Disable power: motor inertia stop.
•
Ramp controlled stop and then disable power.
•
Ramp controlled stop keeping motor in standstill condition at power on.
•
Limit torque stop, setting desired torque limit.
4.
Position Setting:
maximum admitted position error and maximum admitted recovery time setting; beyond
these values drive provides an error/alarm condition.
5.
Digital Input:
drive digital input setting in Modbus RTU operation mode. For any other information about
digital input functions, please see
“6.08.1 Digital I/O functions” pag. 85.
•
Filter Input
: input 1
ST
order filter parameters, in ms unit.
6.
Touch Probe:
parameters for Touch Probe input setting. It’s possible to see Touch Probe status word inside
Drive Data window.
7.
Positioner:
ramp topology and speed/position targets setting; position with its error visualization during
operation.
•
Pos. - Input X:
index stop, at relative position, when event happens on INPUT X of drive I/O connector.
8.
Homing Mode:
HOMING mode setting; zero search speed and switch search speed with acceleration
parameter.
9.
Profile Velocity:
point to point speed targets setting; ramps and speed error window with timeout; speed
visualization during operation.
Содержание NTT 240
Страница 129: ......







































































