Power ON Laser Scanner by pressing the Laser Scanner On/Off Button once. The red indicator light surrounding Laser Scanner On/Off
Button will illuminate and the laser scanner will vibrate gently. Make LiBackpack C50 balance in the horizontal position.
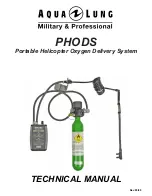
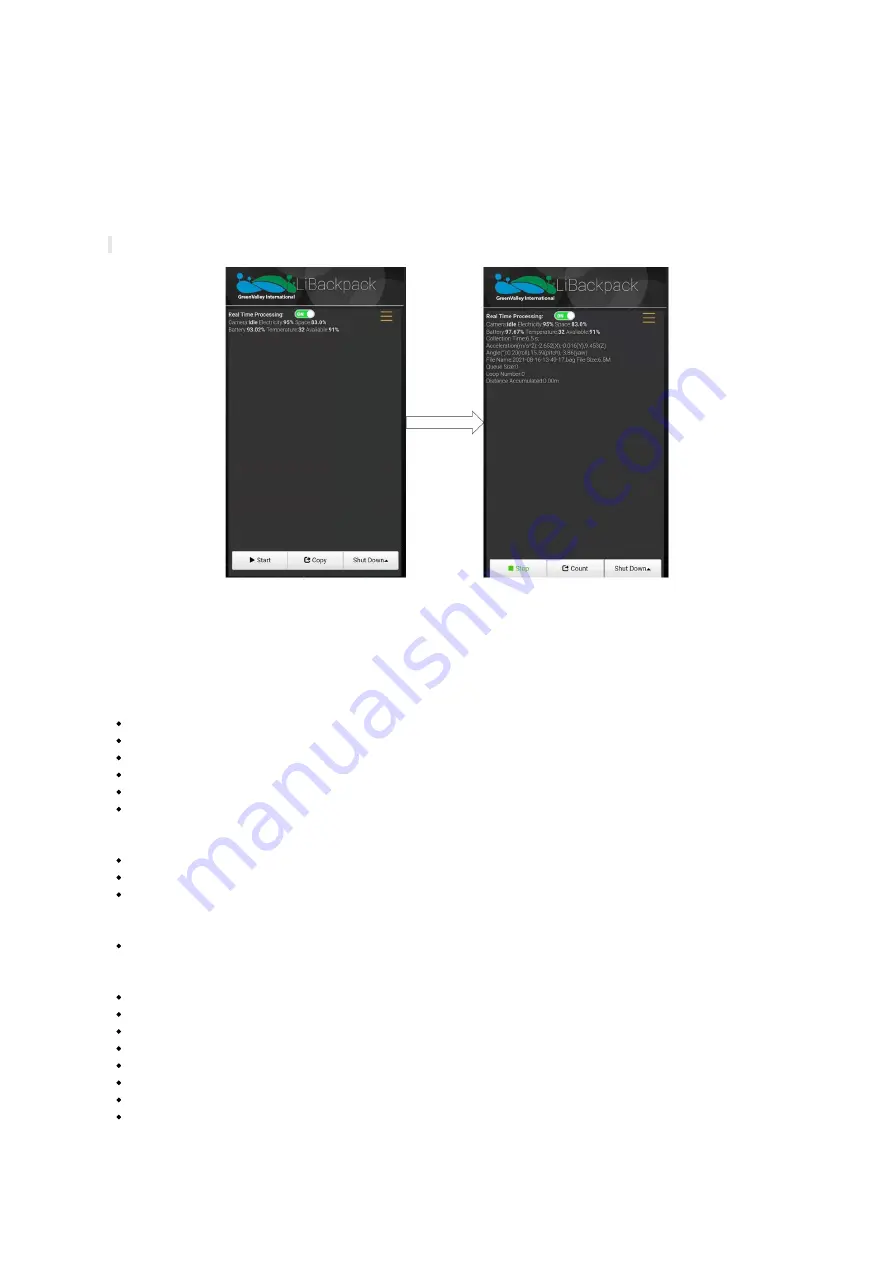
Click on the Start button in the lower left corner of the browser-based LiBackpack user interface. Once point cloud in the display, please walk
in the “8” pattern which will take about 1 minute before you start collecting data following planned routes.
Please note that each scanning session is restricted under 20 minutes, otherwise the camera would be overloaded with data which may result
in unstable performance.
Please wait until the camera status is idle before moving to the next steps.
Start Scanning
5.4 Acquire Data
As the LiBackpack begins acquiring data, the Main Viewer of the web-based UI will display a sparse 3D point cloud constructed in real-time
by GVI's technology. Some system status and acquisition information will display in the upper left corner of the UI, including:
Camera Status
Camera
: OFF/idle/recording:
OFF
: camera is turned off
Idle
: camera is turned on and ready for recording
Recording
: camera is recording
Electricity
: camera battery charge;
Space
:
Camera storage space;
Device Status
Battery
:
Remaining battery power.
Temperature
:
Temperature of main computer.
Avaliable
:
Avaliable space of main computer.
Acquisition Information
Real Time Processing
:
The switch to control the real time processing. If this option is on, the device will process the data in real time
and export the trajectory file and the result point cloud; if this option is off, the device will not process the data and will not export the
trajectory file or the result point cloud.
Collection Time (s)
:
data acquisition time
Acceleration(m/s^2)
:
IMU acceleration
Angle(°)
:
roll
、
pitch
、
yaw
File Name
:
name of current .bag file
File Size
:
size of current .bag file
Queue Size
:
point cloud frame latency
Loop Number
:
current loops closed
Distance Accumulated (m)
:
current distance covered
Содержание LiBackpack C50
Страница 1: ......
Страница 12: ...EMO push pull connector STEP 8 Fully Set Up for Backpack Scanning Mode Fully Set Up...
Страница 27: ...connection Finished see full device below...
Страница 30: ...Point cloud registration...
Страница 34: ...Office Building Underground Garage...
Страница 35: ...Forest Land...
Страница 36: ...Sand Barge Construction Site...
Страница 37: ...Building Foundation Pipelines...
Страница 46: ...Conference Room Office...
Страница 47: ...Auditorium Parking Lot and Underground Parking Garage...
Страница 48: ...Parking Lot and Underground Parking Garage Office Buildings...
Страница 49: ...Forestland...
Страница 50: ...Sand barge Construction site...
Страница 51: ...Building Foundation Pipelines...
Страница 52: ...Powerlines...