

















MANUAL# 5005-2040-000-F UPDATED: 6/1/2021
3
INTRODUCTION
The Glentek SMA5005 and SMA5015 H bridge Linear Servo Drives provide the optimum solution
for applications which require high current loop bandwidth, low radiated electrical noise, and low
crossover distortion. The SMA5015 Drive incorporates our latest generation ISO-BIAS current
sense technology, which provides one of the lowest drift linear Drives on the market today. These
Drives are constructed using surface mount technology and incorporate the latest in heat transfer
technology which make them one of the most powerful Drives for a given form factor.
Typical applications are brushed DC permanent magnet motors and voice coil motors.
The SMA5005 & SMA5015 are configurable and can operate in the following modes:
1. Velocity mode for motors with tachometer feedback*
2. Current mode for torque mode operation
*High performance models only support current mode
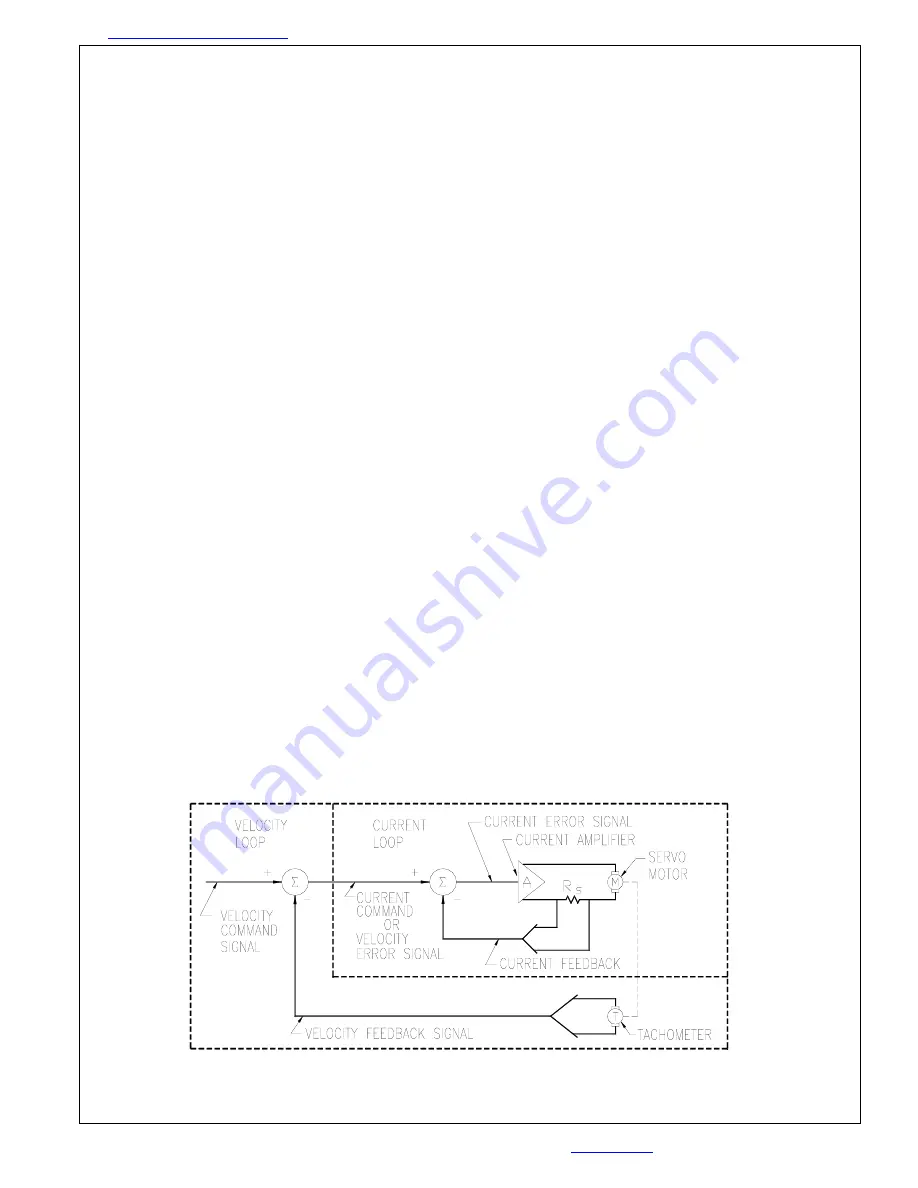
A basic velocity mode servo loop for a brush type motor is shown in figure A. An external controller
commands a given velocity (RPM). The velocity loop summing Drive compares this command with
the actual motor velocity, supplied by a DC tachometer on the motor shaft, and produces an error
voltage proportional to the difference between the actual and commanded velocity.
The velocity error is used to command motor current in the inner servo-loop. The current loop
summing Drive compares the command current (velocity error) with the actual current in the motor
and produces an error voltage proportional to the difference between the actual and commanded
current.
Finally, the current error signal is used to produce an output to drive the motor.
The velocity loop may be bypassed, and an external current command fed directly to the current
loop. In this case, the external command signal controls the torque of the motor, rather than the
velocity. This is known as current-mode operation.
Figure A - Velocity mode servo loop for a brush type motor