





























5-326
M60 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
INPUTS/OUTPUTS
CHAPTER 5: SETTINGS
5
DIRECT INPUT 1 DEVICE ID
— Represents the source of direct input 1. The specified direct input is driven by the device
identified here.
DIRECT INPUT 1 BIT NUMBER
— The bit number to extract the state for direct input 1. Direct Input 1 is driven by the bit
identified as
DIRECT INPUT 1 BIT NUMBER
. This corresponds to the direct output number of the sending device.
DIRECT INPUT 1 DEFAULT STATE
— Represents the state of the direct input when the associated direct device is offline. The
following choices are available:
•
On — Defaults the input to Logic 1
•
Off — Defaults the input to Logic 0
•
Latest/On — Freezes the input in case of lost communications. When the latest state is not known, such as after relay
power-up but before the first communication exchange, the input defaults to Logic 1. When communication resumes,
the input becomes fully operational.
•
Latest/Off — Freezes the input in case of lost communications. When the latest state is not known, such as after relay
power-up but before the first communication exchange, the input defaults to Logic 0. When communication resumes,
the input becomes fully operational.
5.9.6.2 Direct outputs
SETTINGS
INPUTS/OUTPUTS
DIRECT OUTPUTS
DIRECT OUTPUT 1(32)
DIRECT OUT 1 NAME
— This setting allows the user to assign a descriptive name to the direct output.
DIR OUT 1 OPERAND
— This sets the FlexLogic operand that determines the state of this direct output.
5.9.6.3 Application examples
The examples introduced in the earlier Direct Inputs and Outputs section (part of the Product Setup section) are continued
here to illustrate usage of the direct inputs and outputs.
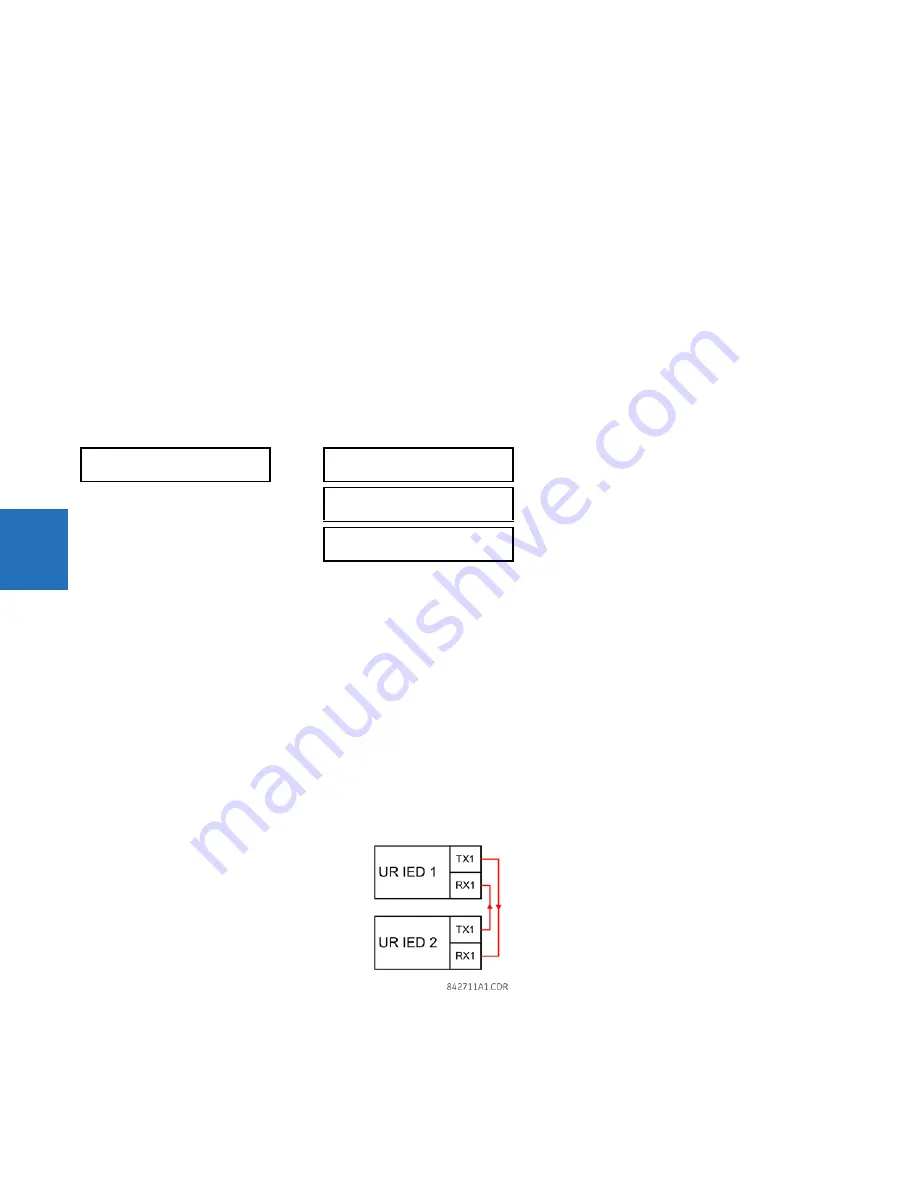
Example 1: Extending input/output capabilities of a UR relay
Consider an application that requires additional quantities of contact inputs or output contacts or lines of programmable
logic that exceed the capabilities of a single UR-series chassis. The problem is solved by adding an extra UR-series IED,
such as the C30, to satisfy the additional inputs/outputs and programmable logic requirements. The figure shows that two
IEDs are connected via single-channel digital communication cards.
Figure 5-184: Input and output extension via direct inputs and outputs
Assume that contact input 1 from UR IED 2 is to be used by UR IED 1. The following settings are applied (Direct Input 5 and
bit number 12 are used, as an example).
UR IED 1:
DIRECT OUTPUT 1
DIRECT OUT 1 NAME:
Dir Out 1
Range: up to 12 alphanumeric characters
DIRECT OUT 1 OPERAND:
Off
Range: FlexLogic operand
DIRECT OUTPUT 1
EVENTS: Disabled
Range: Enabled, Disabled
Содержание M60
Страница 9: ...TABLE OF CONTENTS M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL ix INDEX ...
Страница 10: ...x M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL TABLE OF CONTENTS ...
Страница 14: ...1 4 M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL FOR FURTHER ASSISTANCE CHAPTER 1 INTRODUCTION 1 ...
Страница 208: ...4 88 M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL FLEXLOGIC DESIGN USING ENGINEER CHAPTER 4 INTERFACES 4 ...
Страница 494: ...5 286 M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL CONTROL ELEMENTS CHAPTER 5 SETTINGS 5 Figure 5 158 Time out mode ...
Страница 552: ...5 344 M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL TESTING CHAPTER 5 SETTINGS 5 ...
Страница 596: ...7 14 M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL TARGETS MENU CHAPTER 7 COMMANDS AND TARGETS 7 ...
Страница 602: ...9 4 M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL SATURATION DETECTOR CHAPTER 9 THEORY OF OPERATION 9 ...
Страница 652: ...C 6 M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL COMMAND LINE INTERFACE APPENDIX C COMMAND LINE INTERFACE C ...
Страница 660: ...iv M60 MOTOR PROTECTION SYSTEM INSTRUCTION MANUAL ABBREVIATIONS ...







































































