




























20
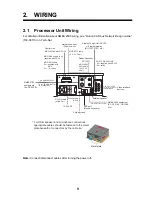
14.At the Output Sentences field, check the NMEA0183 sentences to output.
Note
: If the Pilot mode is chosen to Zeus (at step 11), check APB, RMC, and XTE.
15.At the Sensor Type field, check sensor data that is input to the MFD.
Example 1: Check Position & SOG/COG for GPS receiver connection.
Example 2: Check Heading for heading sensor connection.
When using the DATA2 and/or DATA3 ports on the MFD, set the NMEA0183 port 2 and/or port
3.
16.If the GPS receiver GP-320B is connected, click the [Advanced Setup] button to show the set-
ting menu for GP-320B. Set all items referring to the table shown below.
NMEA0183 Output sentences
Name
Meaning
Name
Meaning
AAM
Waypoint arrival alarm
RMA
Loran-C data
APB
Autopilot sentence
RMB
BOD
Bearing origin to destination
RMC
GPS/Transit
BWC/BWR Bearing and distance to waypoint
VHW
Speed/heading (through water)
DBT
Depth below transducer
VTG
Speed over ground, course (true)
GGA
GPS fix data
WPL
Waypoint location
GLL
Geographic position (L/L)
XTE
Cross-track error, measured
GTD
Geographical Position, Loran-C TDs ZDA
Time and date
HDT
Heading true
ZTG
UTC and time to destination waypoint
MTW
Water temperature
att
Heading/Roll/Pitch
Basic Setup
Содержание MFDBB
Страница 2: ......
Страница 42: ...8 Aug 2012 Y NISHIYAMA ...
Страница 43: ...Jun 27 07 R Esumi ...
Страница 44: ...Oct 22 07 R Esumi ...
Страница 45: ...Oct 22 07 R Esumi ...
Страница 47: ......






































































