





























THEA-130 / 160 Sprayer Drone
User Manual
©
2019 FOXTECH All Rights Reserved
24
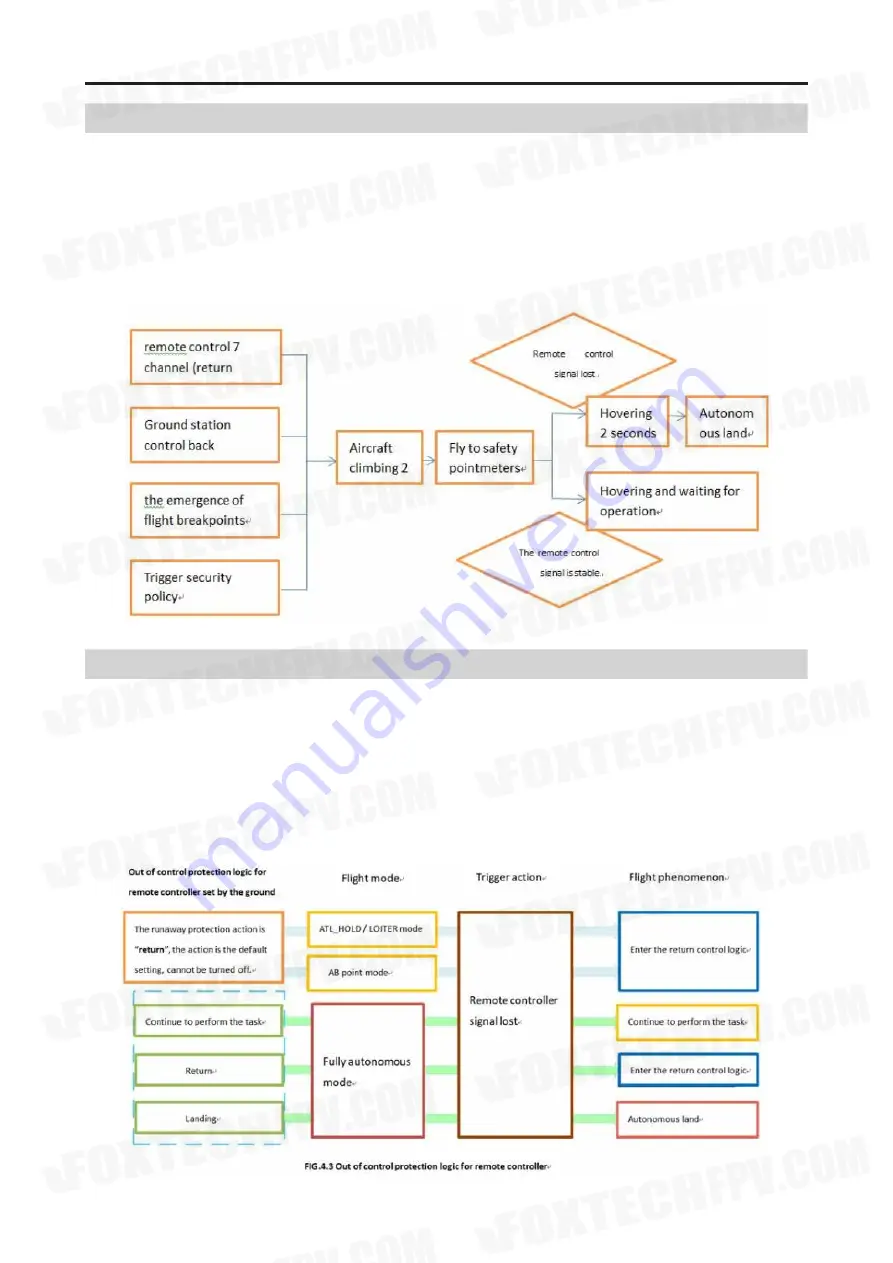
Return Logic
Remote Control Security
The trigger conditions of aircraft into the return status are: remote control channel 7 (return mode) to high,
the ground station control, the emergence of flight breakpoints, the phenomenon of runaway protection, etc.
The return process is: the aircraft climbed 2 meters in the current location (to ensure return safety, climbing
value can be set by the ground station), then fly to safety point (return back to the point if no automatic
mode has been taken off or return to nearest ascending point if there is a near standby point) and hovering
waiting for the operation, if the remote control signal is lost during the return process, the aircraft will hover
for 2 seconds to perform autonomous landing. The returning logic execution diagram is:
Remote control is the most direct means of control the aircraft, from a security point of view, the current
remote control for UAV plant protection operations are still irreplaceable. In order to ensure the safety of
UAV flight, taking into account the actual needs of large areas of independent spraying, PALADIN designed
a more complete remote control security strategy. The out-of-control protection action can be set by the
ground station software. It should be pointed out that the out-of-control protection setting of the remote
controller is only for the "fully autonomous mode"; the manual mode (constant height / positioning mode)
and the AB point mode are both open by default and cannot be closed, the remote control out of control
logic diagram (for details, please refer to "5.4.3 Security Settings"):


























































