





























3
Mounting and installation
26
Festo – GDCP-CAMC-G-S1-EN – 1412b – English
3.2.2
Connection [X40]
The CAMC-G-S1 safety module has a combined interface for control and acknowledgment via the plug
connector [X40].
–
Type on device: PHOENIX MINICOMBICON MC 1.5/8-GF-3.81 BK
–
Plug (supplied as standard): PHOENIX MINICOMBICON MC 1.5/8-STF-3.81 BK, connection corres
ponds to Section A.1.4, Tab. A.13
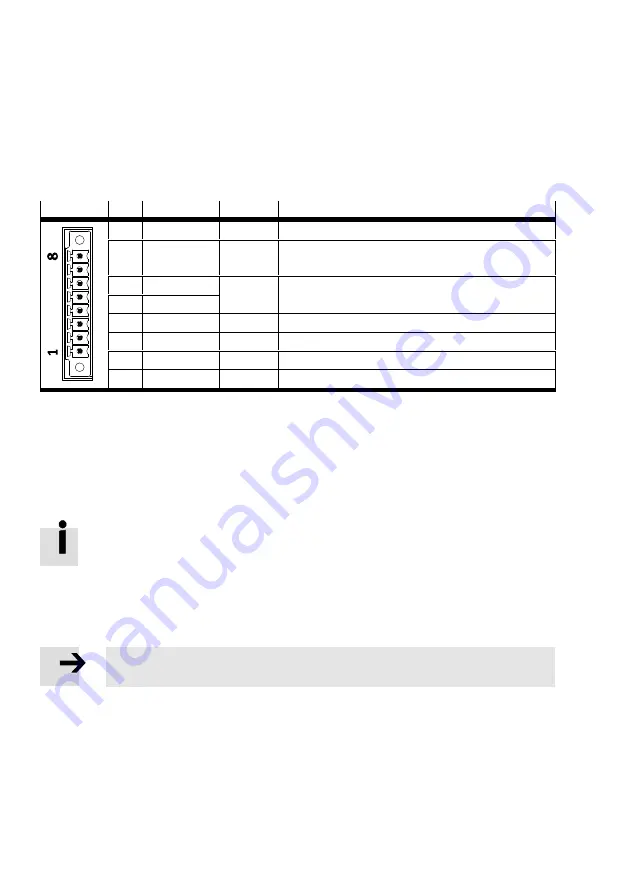
Plug
Pin
Designation
Value
Description
8
0V
0 V
Reference potential for auxiliary power supply.
7
24V
+24 V DC
Auxiliary power supply (24 V DC logic supply of the
motor controller carried out).
6
C2
–
Feedback contact for the status STO on an external
controller.
5
C1
4
0V-B
0 V
Reference potential for STO-B.
3
STO-B
0 V / 24 V Control port B for the function STO.
2
0V-A
0 V
Reference potential for STO-A.
1
STO-A
0 V / 24 V Control port A for the function STO.
Tab. 3.1
Pin allocation [X40] (representation of the plug connector on the module)
To ensure the STO Safe Torque Off functions correctly, the control ports STO-A and STO-B are to be
connected in two channels with parallel wiring
è
This interface can be part of an emergency stop circuit or a protective door arrangement, for example.
3.2.3
Minimum wiring for commissioning [X40]
If a safety oriented interface is (still) not present, the switch module CAMC-DS-M1 should be used.
The module replacement must be configured and acknowledged in the FCT
è
Also observe the DIP switch setting
è
If no micro switch module is available or for the initial commissioning of the motor controller without
safety equipment, the motor controller CMMP-AS-…-M3 with the safety module CAMC-G-S1 can be
equipped with an emergency stop switch (
2
) with minimum wiring as per Fig. 3.2.
Note
Safety functions must never be bypassed.
Carry out the minimum wiring of the inputs STO-A/STO-B and 0V-A/0V-B for the initial commissioning
so that it will be forcibly removed when the final protection wiring is executed.







































































