





























SD20-G Series
253
VII. Adjustments
7.1 Summary
Servo drive needs rapid, accurate drive motor to track PC/PLC or its internal setting instructions. To
achieve the requirements, reasonable adjustments for servo gain must be made.
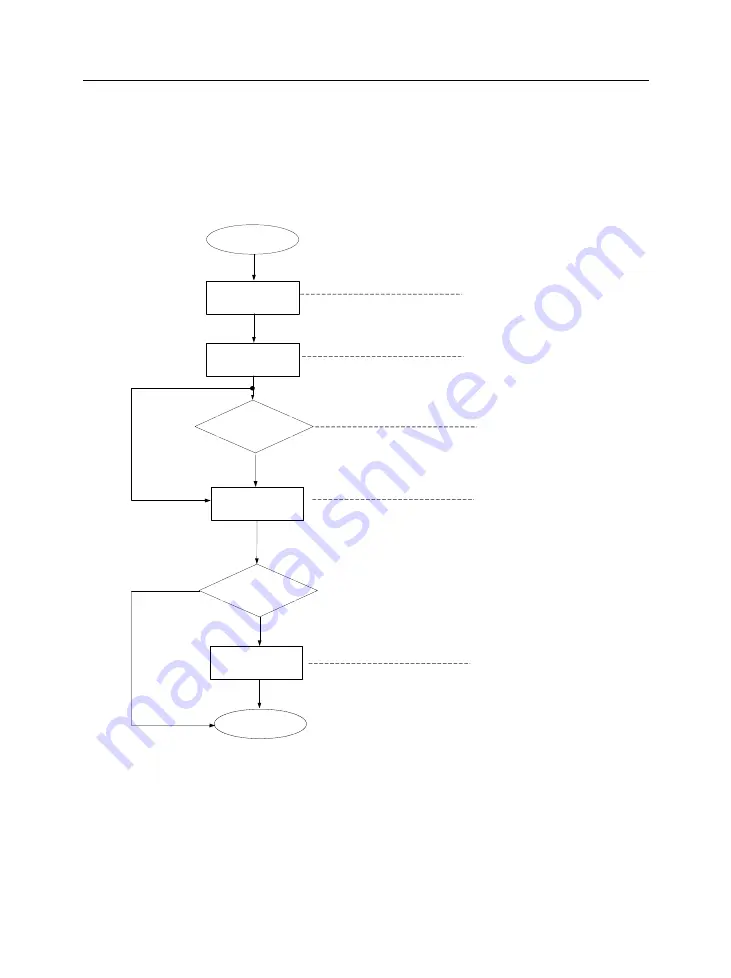
The general process of gain adjustment shows as below:
Equipment test running
Notch filter function etc.
See chapter 7.5 for reference
Start
Inertia
Identification
Rigid
Selection
Processing meets
the needs?
Manual
Adjustment
Vibration
Supression
Finish
YES?
NO?
Offline or online
inertia identification
Vibration?
Test Run
YES?
NO?
Manual gain adjustment
See chapter 7.4.3 for reference
Rigid Selection
Fig 7.1.1Gain adjustment flow chart
Note:
● It is recommended that jog test running firstly before gain adjustment to ensurethe normal
running of motor;
● Servo gain can be set by the combination of multi-parameters(position-loop, speed-loop, filter,
load rotational inertia ratio etc.), they influences with each other, therefore, the setting of servo gain
must consider the balance of each parameter;
Содержание SD20-G Series
Страница 35: ...SD20 G Series 35 M3 structure Fig 3 1 5 Servo drive structure 3...
Страница 36: ...SD20 G Series 36 ML3 structure 118 5 5 7 5 93 297 8 223 118 93 0 5 12 5 7 5 4 M4...
Страница 38: ...SD20 G Series 38 M4 structure Approx mass 10 365 kg Fig 3 1 7 Servo drive structure 5...
Страница 39: ...SD20 G Series 39 M5 structure Approx msaa 11 1Kg Fig 3 1 8 Servo drive structure 6...
Страница 40: ...SD20 G Series 40 M6 structure Approx mass 17 4Kg Fig 3 1 9 Servo drive structure 7...
Страница 182: ...SD20 G Series 182 Fig 6 4 44SD20E Cam internal frameworkdiagram...







































































