




























Instruction Manual
D200149X012
3610J and 3620J Positioners
September 2017
32
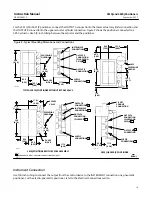
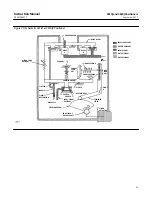
Figure 19. Schematic of Fisher 3610J Positioner
38A8901‐B
B1844‐1
MINOR LOOP
GAIN ADJ
ZERO ADJ
RANGE SPRING
COARSE
SPAN
ADJ
CROSS‐OVER ADJ
RELAY BEAM
RELAY
B
RELAY
A
SUPPLY PRESSURE
NOZZLE PRESSURE
INPUT SIGNAL
OUTPUT SIGNAL
AIR
SUPPLY
FINE
SPAN
ADJ
PIVOT B
FEEDBACK
LEVER
INPUT MODULE
PIVOT A
FLAPPER
NOZZLE
FIXED
RESTRICTION
AIR SUPPLY
CAVITY A
CAVITY B
INPUT SIGNAL
PRESSURE
POSITIONER CAM
END VIEW OF
ROTARY SHAFT
SPRING AND DIAPHRAGM
ACTUATOR
SUMMING BEAM
COUNTER SPRING
As a result, the actuator rod extends and the actuator rotary shaft rotates clockwise. This causes the feedback lever to
pivot clockwise increasing the force applied to the summing beam by the range spring. This force, which opposes the
downward force on the summing beam caused by the increasing input signal pressure, continues to increase until the
summing beam torques are in equilibrium. At this point, the valve shaft is in the correct position for the specific input
signal applied.
For reverse action, input signal pressure is channeled to both cavities A and B. An increase in input signal pressure
results in an upward force on the summing beam, pivoting the summing beam clockwise and causing relay B to
exhaust actuator upper cylinder pressure to atmosphere and relay A to increase actuator lower cylinder pressure. As a
result, the actuator rod retracts and the actuator rotary shaft rotates counterclockwise. This causes the feedback arm
to pivot counterclockwise reducing the force applied to the summing beam by the range spring.
As the valve shaft rotates counterclockwise, the range spring force on the summing beam continues to reduce until
the summing beam torques are in equilibrium. At this point, the valve shaft is in the correct position for the specific
input signal applied.
The 3620J positioner is a combination of a 3610J positioner with a 3622 electro‐pneumatic converter. The
electro‐pneumatic converter provides a 0.2 to 1.0 bar (3 to 15 psig) output pressure proportional to the 4 to 20
milliampere DC input signal. The 0.2 to 1.0 bar (3 to 15 psig) output pressure becomes the input signal pressure to the
3610J pneumatic positioner.






















































