




























Mechanical Operation and Maintenance Manual for ER20-1100 Industrial Robot
10
Save completed programs to prevent accidental editing.
Confirm the program number and procedure number in teaching before operation.
Editing programs and procedures incorrectly could cause accidents.
When it is not necessary to make robot’s movement and operate it, please cut off the
power before proceeding.
When teaching is completed, check robot’s movement manually in low-speed state. If it
is operated with 100% full speed in automatic mode, accidents may occur due to program
errors.
Cleaning should be done and tools must be confirmed to be taken away after teaching is
completed. Oil contamination in the work area and forgetting tools may cause accidents,
such as falls.
Ensuring safety start with tiding up.
1.2 Instructions of Labels on Robot Body
Safety labels are affixed on specific parts of the robot to warn users of safety precautions
in operating and maintaining it.
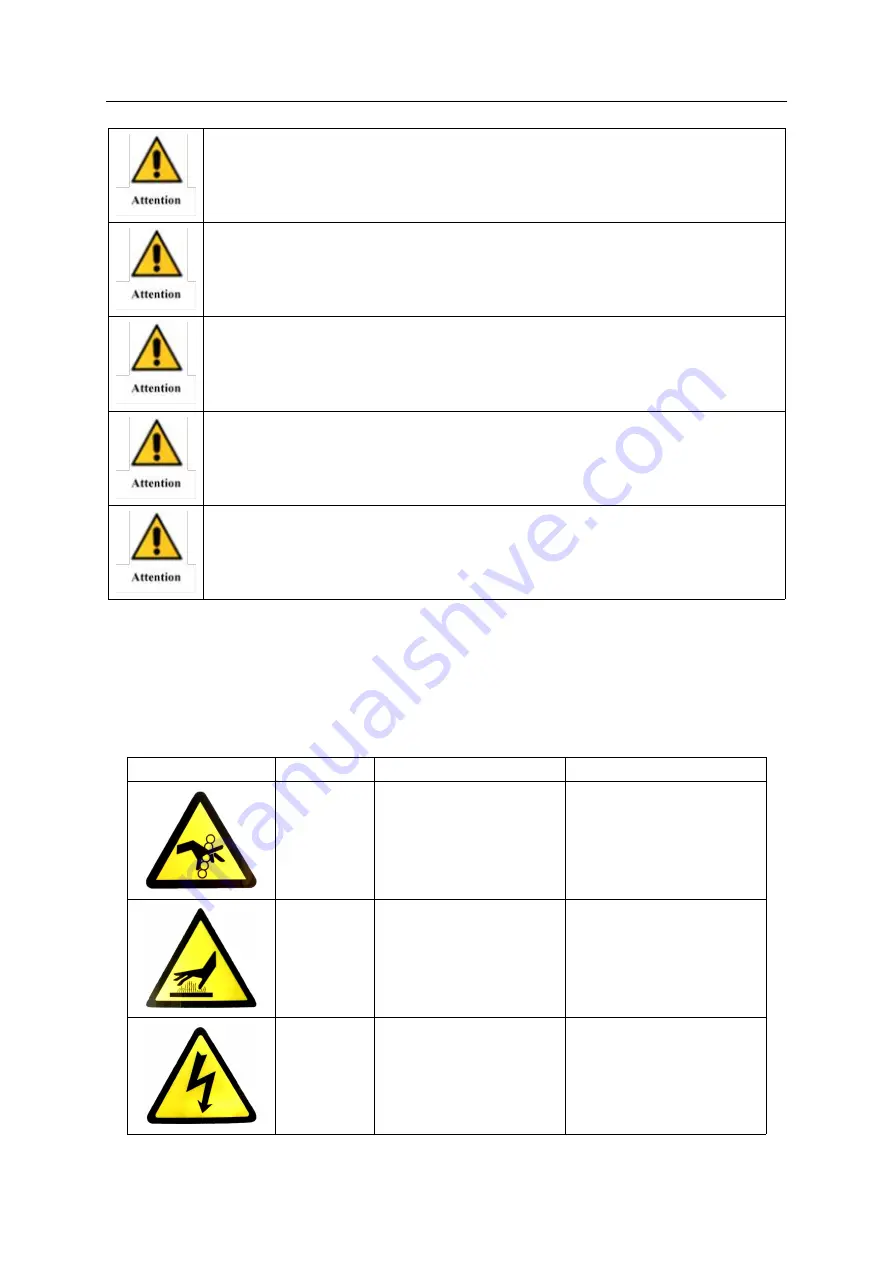
Label
Name
Description
Attached part
Be careful
not to clamp
hands
The movable parts of the
robot may clamp your
hands.
It is generally pasted on the
rotating joint of the power
arm and the connecting rod.
Caution, hot
Robot operation causes
heat on some parts.
It is generally pasted on the
motor to suggest hot motor
and no touching with bare
hands.
Be cautious
of electric
shock
The risk of electric shock
exists at the electrical
connection parts.
It is generally pasted on the
motor and the panel of the
circular connector base to
remind the user be careful
when connecting and





































































