




























12
O
PERATIONAL
S
TATES
A
UTONOMOUS
M
ISSION
S
TATE
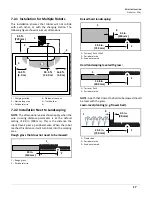
The following describes the path of the robot exiting
the field for a multi-field installation:
•
at Point A the robot begins to follow the Field 1
track border
•
at Point B it turns into the Field 2 track border
(this is where the fields overlap)
•
at Point C it turns into Field 2
The distance traveled along the Field 2 track border,
and the angle at which the robot turns into Field 2, is
specified in the StartZone parameters for Field 2.
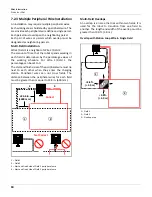
6.1.2 Work Mode
In the work mode the robot operates within the
working area at a default speed of 2.2 mph (1.0 m/s).
When the robot approaches the peripheral wire it
slows down and crosses over it by a predefined
distance. It will then stop, move in reverse, turn
randomly between 60° and 120° and continue in a new
direction.
6.1.3 Go To Charging Station Mode
When working, the robot checks its current conditions
and programmed instructions. Examples are:
•
the battery needs to be charged
•
programmed working time has ended (for
multi-field installations, this corresponds to the
schedule for the field which the robot is currently
working)
•
a remote command has been issued
As a result of the condition or programmed instruction,
the robot will return to the charging station and enter
the charge mode.
1 – Field 1 track border
2 – Field 2 track border
B
C
1
2
A
1 – Peripheral wire
1







































































